Работа с GPIO на Raspberry Pi 5
Содержание
- Работа с цифровым вводом и выводом через gpiozero
- Аппаратный ШИМ на Raspberry Pi 5
- Подключение и управление сервоприводом
GPIO (General-Purpose Input/Output) – это тип пинов, напряжение на которых можно программно изменять. На Raspberry Pi 5 часть GPIO-пинов поддерживает аппаратный ШИМ (PWM), которым удобно управлять через библиотеку rpi_hardware_pwm.
Используйте схему распиновки, чтобы понять, какие пины на Raspberry Pi 5 поддерживают GPIO и аппаратный ШИМ.
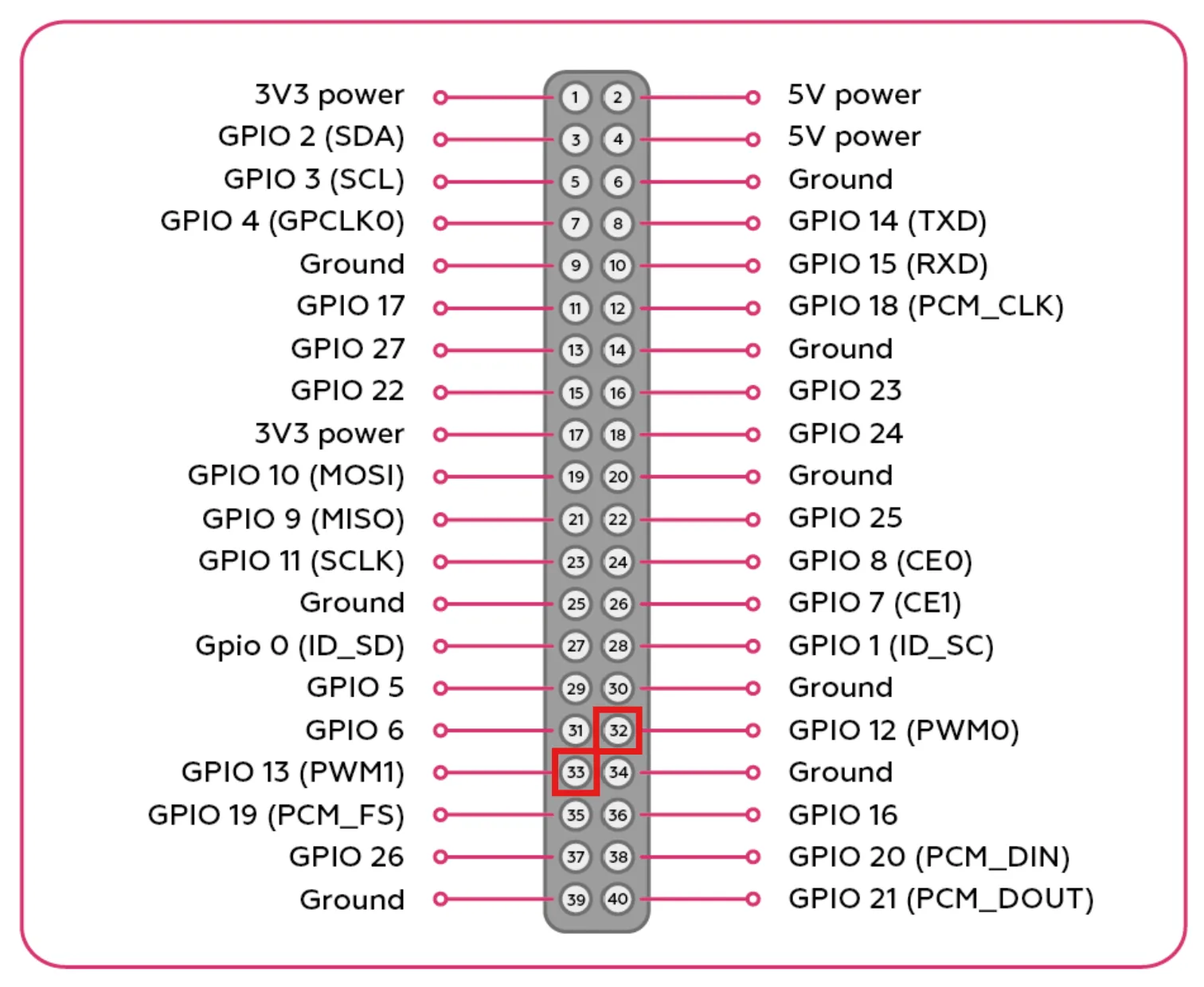
Рисунок 1 – Схема распиновки Raspberry Pi
В отличие от статьи Работа с GPIO, здесь рассматриваются GPIO на Raspberry Pi 5. Для цифрового ввода и вывода удобно использовать библиотеку
gpiozero, а для аппаратного ШИМа на поддерживаемых пинах –rpi_hardware_pwm.
Работа с цифровым вводом и выводом через gpiozero
Для цифрового ввода и вывода на Raspberry Pi 5 удобно использовать библиотеку gpiozero. Она подходит для случаев, когда нужно включить или выключить нагрузку, считать состояние пина или обработать нажатие кнопки.
Нумерация GPIO в примерах ниже использует GPIO-номера пинов, а не физические номера на гребенке Raspberry Pi.
Установите библиотеки lgpio и gpiozero:
sudo apt update
sudo apt install python3-lgpio python3-gpiozero
Пример работы с библиотекой gpiozero:
from time import sleep
from gpiozero import InputDevice, OutputDevice
# Создаем объект для работы с выходом на GPIO17
out_pin = OutputDevice(17)
# Создаем объект для чтения состояния GPIO27
in_pin = InputDevice(27)
# Подаем сигнал на GPIO17
out_pin.on()
sleep(2)
# Отключаем сигнал на GPIO17
out_pin.off()
# Считываем состояние GPIO27
level = in_pin.value
print(f"Input level: {level}")
Аппаратный ШИМ на Raspberry Pi 5
Библиотека rpi_hardware_pwm работает только с аппаратными ШИМ-каналами Raspberry Pi.
Для Raspberry Pi 5 можно использовать следующие GPIO-номера пинов:
| GPIO | Физический пин | Канал HardwarePWM |
|---|---|---|
| GPIO12 | 32 | 0 |
| GPIO13 | 33 | 1 |
Подключение и управление сервоприводом
Сервопривод обычно управляется сигналом с частотой 50 Гц. Обычно управляющий сигнал для сервопривода имеет диапазон значений от 1000 до 2000 мкс.
1000мкс — начальное положение;1500мкс — среднее положение;2000мкс — конечное положение.
Подключите:
- сигнальный провод сервопривода к
GPIO13; - питание сервопривода к внешнему источнику 5 В или через BEC;
- землю внешнего питания обязательно объедините с
GNDRaspberry Pi.
Пример кода для управления сервоприводом:
from rpi_hardware_pwm import HardwarePWM
import time
# Частота управления сервоприводом обычно составляет 50 Гц
SERVO_PWM_HZ = 50
# DUTY - это коэффициент заполнения ШИМ-сигнала в процентах
# При частоте 50 Гц период равен 20 мс:
# 0.5 мс -> 2.5%
# 1.5 мс -> 7.5%
# 2.5 мс -> 12.5%
# Эти импульсы обычно соответствуют положениям 0°, 90° и 180°.
DUTY_0 = 2.5
DUTY_90 = 7.5
DUTY_180 = 12.5
# Создаем объект для работы с аппаратным ШИМ на GPIO13 (PWM1)
pwm = HardwarePWM(pwm_channel=1, hz=SERVO_PWM_HZ, chip=0)
def set_servo_angle(duty_cycle):
# Применяем новое значение к ШИМ-сигналу
duty_cycle = max(DUTY_0, min(DUTY_180, duty_cycle))
pwm.change_duty_cycle(duty_cycle)
def servo_demo(wait_s=2):
try:
# Запускаем ШИМ и сразу ставим сервопривод в положение 0°
pwm.start(DUTY_0)
time.sleep(1)
print("0°")
set_servo_angle(DUTY_0)
time.sleep(wait_s)
# Переводим сервопривод в 90°
print("90°")
set_servo_angle(DUTY_90)
time.sleep(wait_s)
# Переводим сервопривод в 180°
print("180°")
set_servo_angle(DUTY_180)
time.sleep(wait_s)
finally:
# При явной остановке отключаем ШИМ
pwm.stop()
if __name__ == "__main__":
servo_demo()
После вызова
pwm.stop()управляющий сигнал пропадает, поэтому редуктор перестает удерживать позицию и может изменить своё положение.