Работа с магнитным захватом
Содержание
- Сборка и установка модуля
- Проверка работоспособности
- Управление магнитным захватом с помощью аппаратуры
Сборка и установка модуля
Спаяйте модуль магнитного захвата согласно схеме подключения. Провода на концах должны быть с разъемами Dupont female (длина проводов ~10-15см).
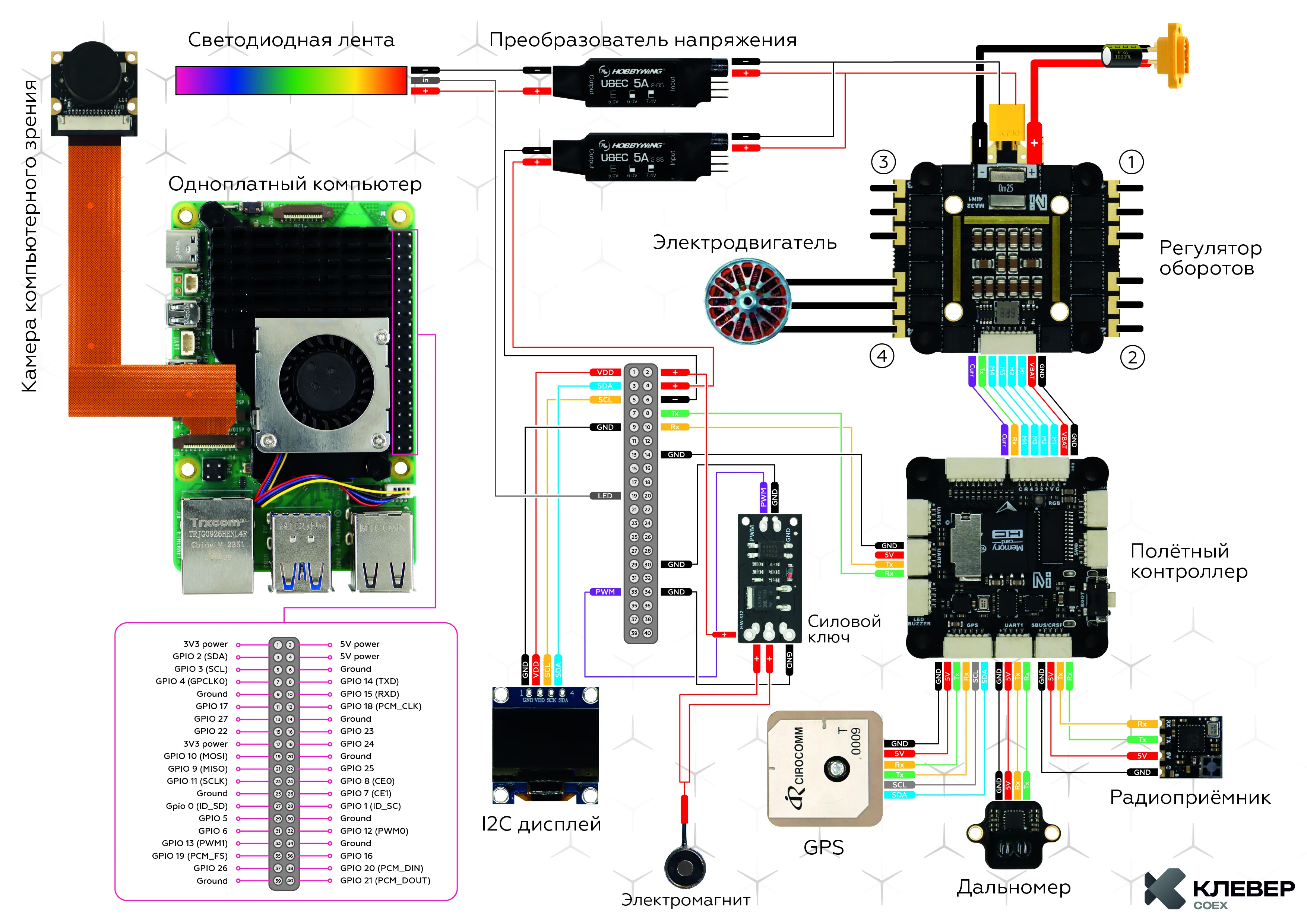 Схема подключения электроники
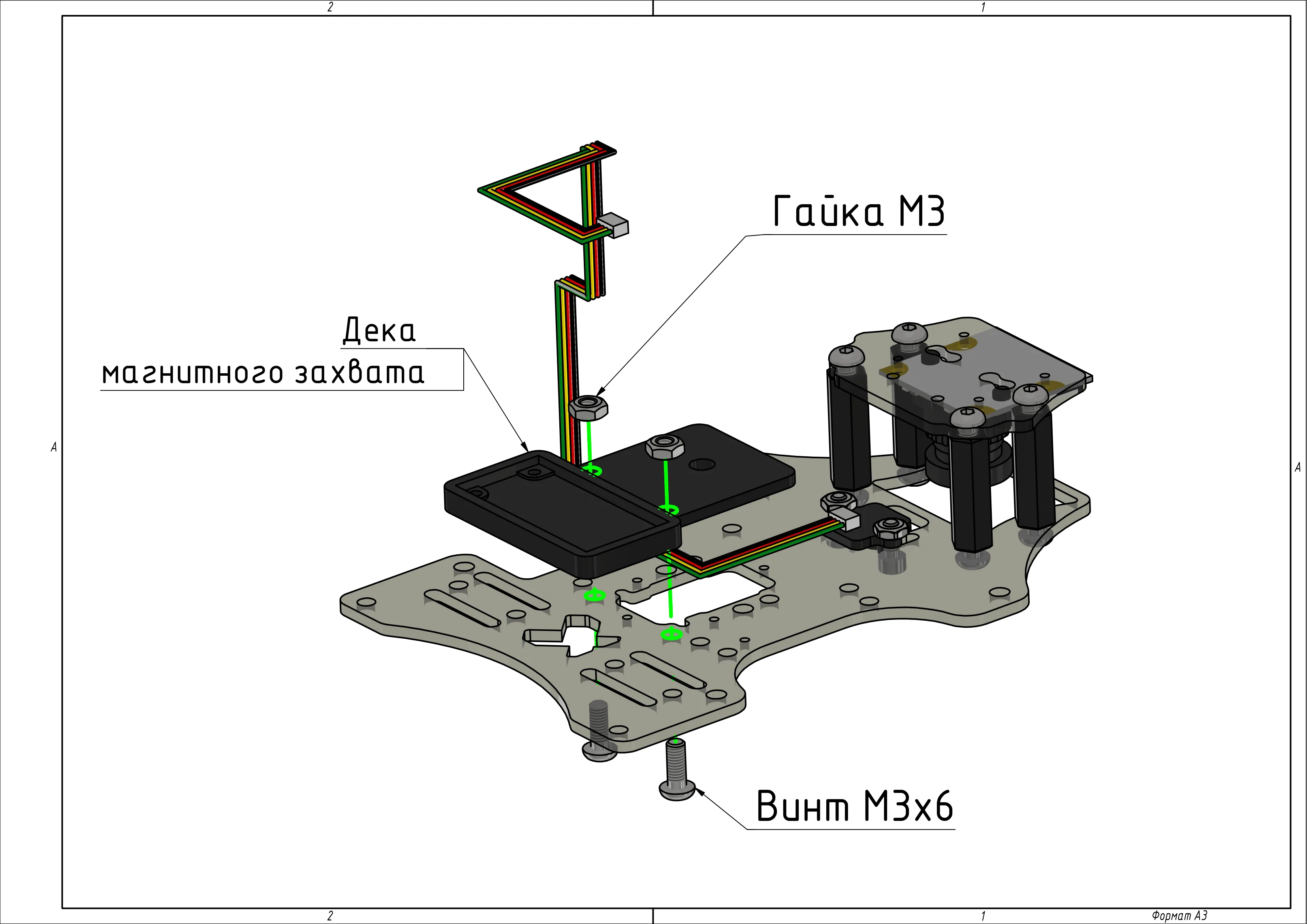
Схема подключения электроникиУстановите деку магнитного захвата при помощи винтов M3x6 и гаек М3.
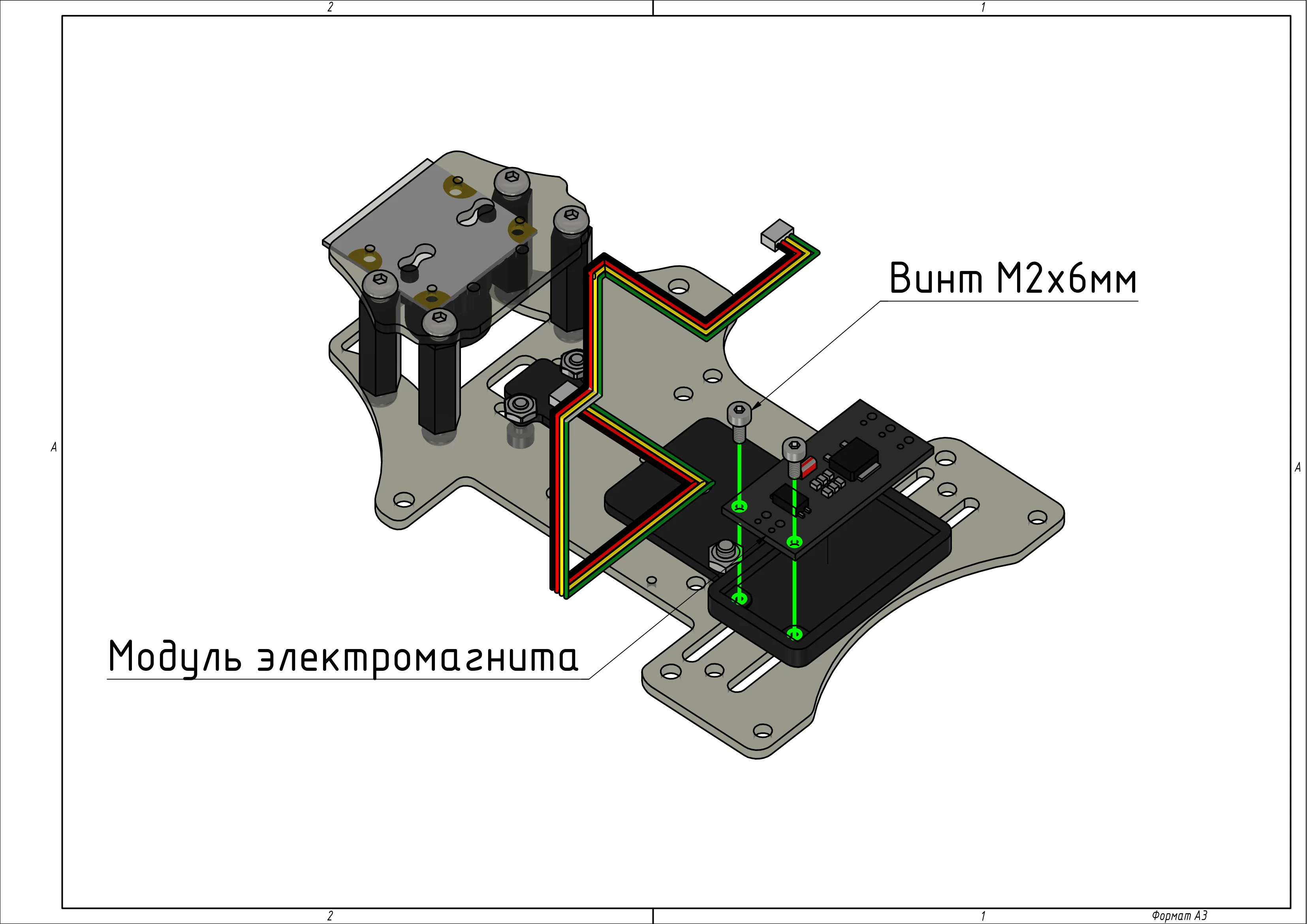
Установите модуль электромагнита на деку захвата с помощью винтов M2x6.
Установите электромагнит на деку захвата при помощи винта M4x6.
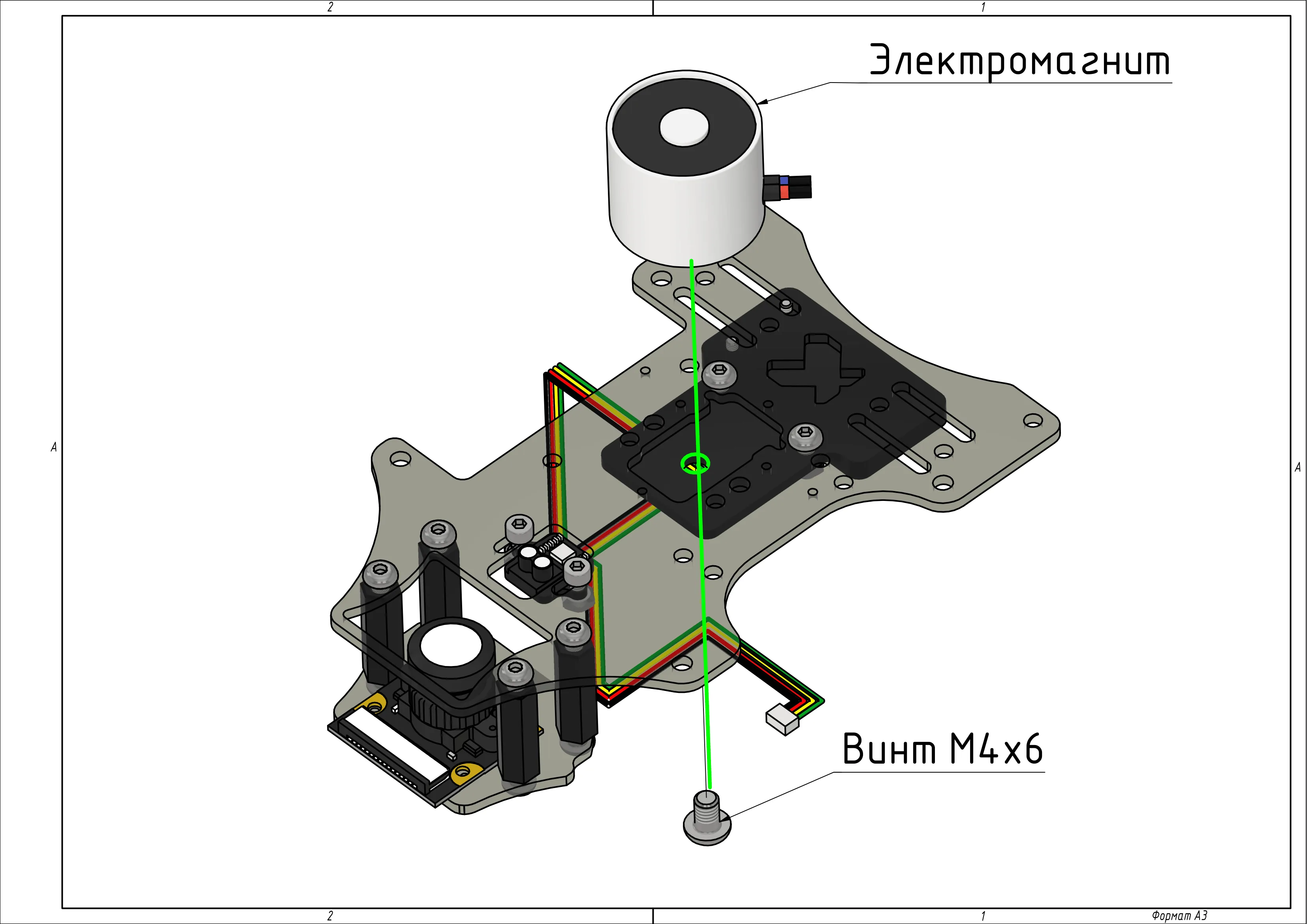
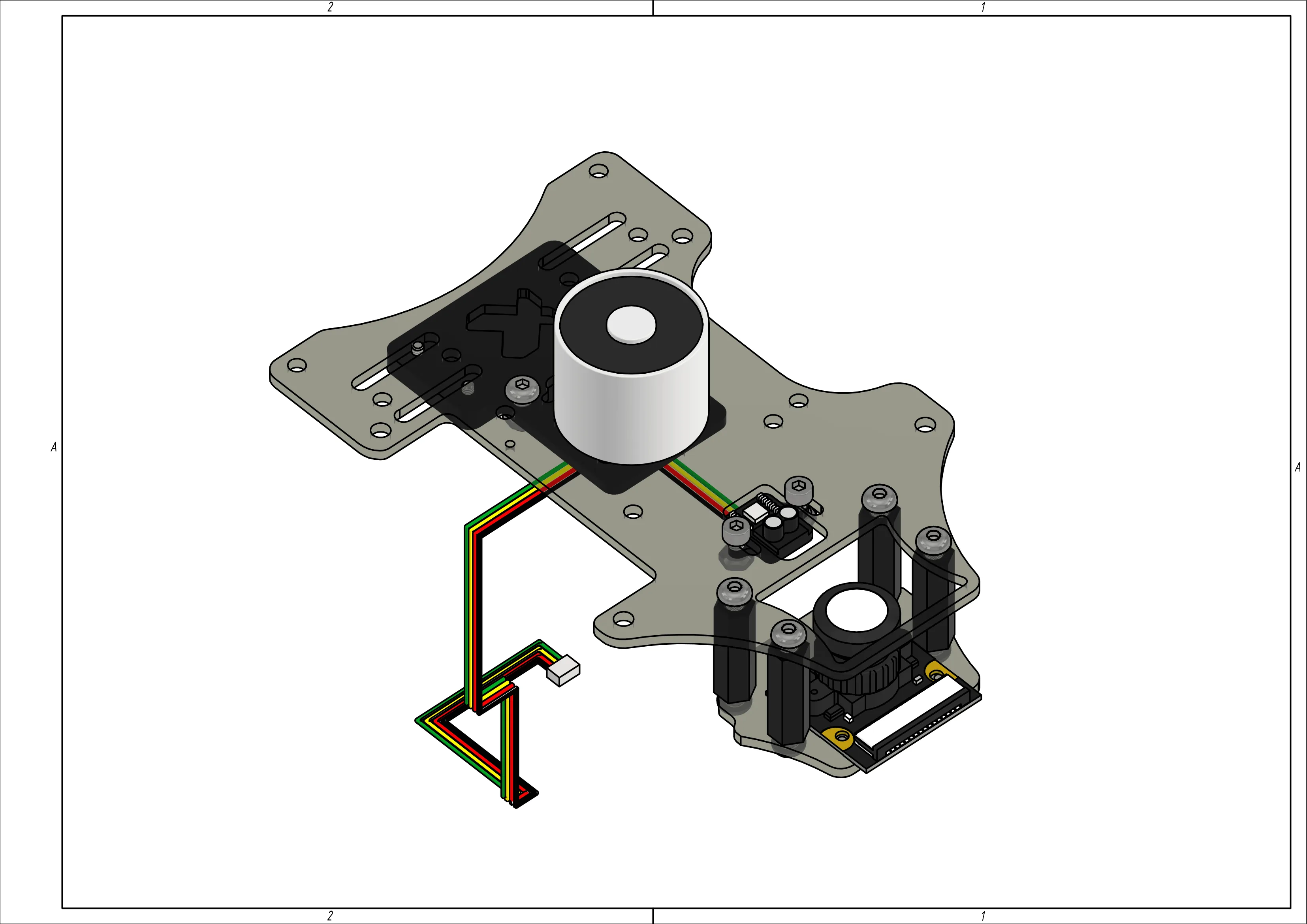
Магнитный захват в сборе.
Подключите магнитный захват к Raspberry Pi согласно схеме подключения электроники (см. пункт 1).
Проверка работоспособности
Загрузите пример кода для работы с магнитным захватом чтобы проверить работоспособность.
from rpi_hardware_pwm import HardwarePWM
import time
# pwmchip0, канал 1
pwm = HardwarePWM(pwm_channel=1, hz=50, chip=0)
def control_magnet(on_time=2, off_time=2):
try:
pwm.start(0)
while True:
print("ВКЛ")
pwm.change_duty_cycle(100)
time.sleep(on_time)
print("ВЫКЛ")
pwm.change_duty_cycle(0)
time.sleep(off_time)
finally:
pwm.stop()
if __name__ == "__main__":
control_magnet(on_time=2, off_time=2)
Управление магнитным захватом с помощью аппаратуры
Чтение значений каналов RC
Информацию по топикам MAVROS см. по ссылке.
Пример кода для считывания значений с каналов при переключении тумблера:
import rospy
from mavros_msgs.msg import RCIn
last_state = None
def rc_callback(data: RCIn):
global last_state
if len(data.channels) <= 6:
return
ch = data.channels[6]
if ch < 1000:
state = 'ARMING'
elif ch > 1900:
state = 'DISARMED'
else:
state = None
if state is not None and state != last_state:
print(state)
last_state = state
def main():
rospy.init_node('rc_reader')
rospy.Subscriber('mavros/rc/in', RCIn, rc_callback)
rospy.spin()
if __name__ == '__main__':
main()
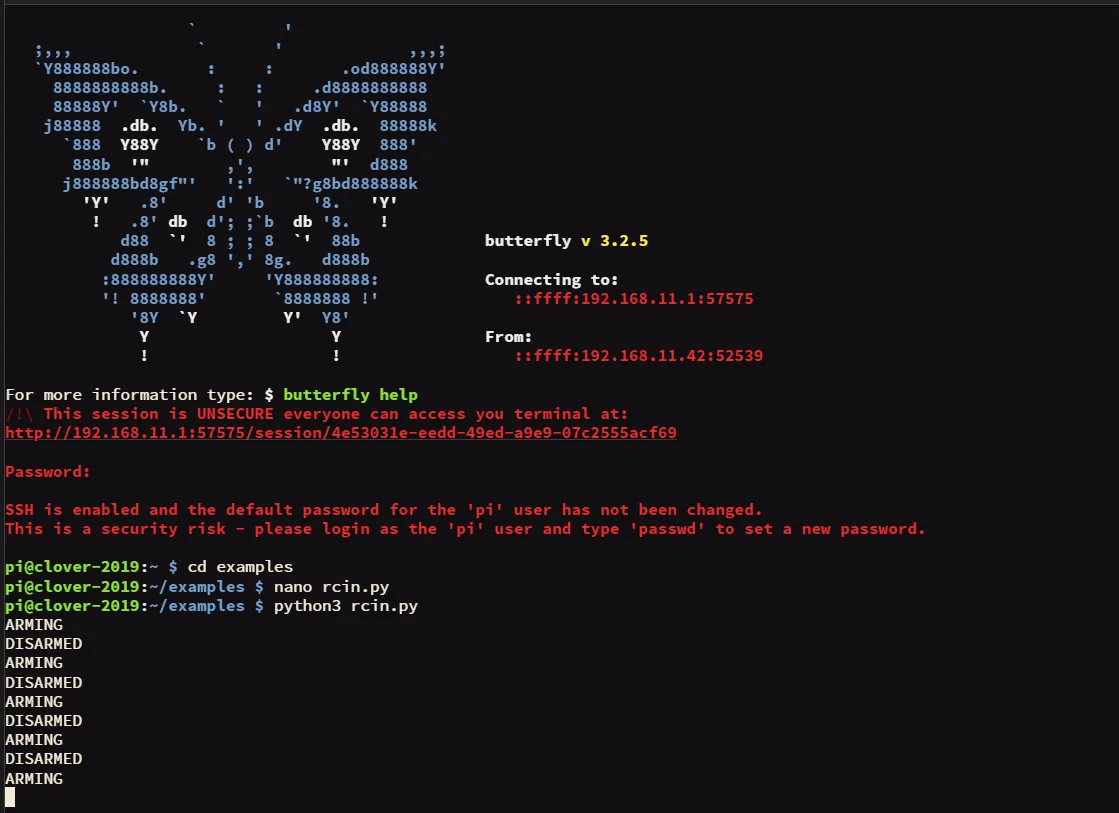
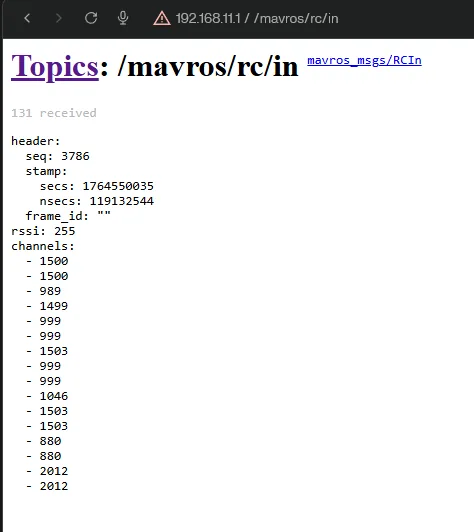
Пример вывода в топике и терминале:
Пример кода управления магнитным захватом
Пример кода управления магнитным захватом через аппаратуру:
import rospy
from mavros_msgs.msg import RCIn
from rpi_hardware_pwm import HardwarePWM
pwm = None
magnet_on = False
def rc_callback(data: RCIn):
global magnet_on
if 6 >= len(data.channels):
return
ch = data.channels[6]
if ch < 1000 and magnet_on:
rospy.loginfo("OFF")
pwm.change_duty_cycle(0)
magnet_on = False
elif ch > 1900 and not magnet_on:
rospy.loginfo("ON")
pwm.change_duty_cycle(100)
magnet_on = True
def main():
global pwm
rospy.init_node('magnet_rc')
pwm = HardwarePWM(pwm_channel=1, hz=50, chip=0)
pwm.start(0)
rospy.Subscriber('mavros/rc/in', RCIn, rc_callback)
rospy.loginfo("magnet_rc start")
rospy.spin()
pwm.stop()
if __name__ == '__main__':
main()
Пример кода для плавного захвата груза с помощью сервопривода:
import rospy
from mavros_msgs.msg import RCIn
from rpi_hardware_pwm import HardwarePWM
pwm = None
S1_INDEX = 8
RC_MIN = 1000
RC_MAX = 2000
ANGLE_MIN = 0.0
ANGLE_MAX = 90.0
DUTY_MIN = 3
DUTY_MAX = 12
def rc_callback(msg: RCIn):
if len(msg.channels) <= S1_INDEX:
return
ch = msg.channels[S1_INDEX]
if ch < RC_MIN:
ch = RC_MIN
elif ch > RC_MAX:
ch = RC_MAX
k = float(ch - RC_MIN) / float(RC_MAX - RC_MIN)
angle = ANGLE_MIN + (ANGLE_MAX - ANGLE_MIN) * k
duty = DUTY_MIN + (DUTY_MAX - DUTY_MIN) * (angle / ANGLE_MAX)
pwm.change_duty_cycle(duty)
def main():
global pwm
rospy.init_node('servo_from_slider')
pwm = HardwarePWM(pwm_channel=1, hz=50, chip=0)
pwm.start(DUTY_MIN)
rospy.Subscriber('mavros/rc/in', RCIn, rc_callback)
rospy.loginfo('servo_from_slider start')
rospy.spin()
pwm.stop()
if __name__ == '__main__':
main()