Сборка Клевера 5
Содержание
- Схема подключения электроники
- Сборка рамы
- Установка ESC
- Установка алюминиевых стоек
- Установка полетного контроллера
- Установка Raspberry Pi
- Установка защиты, ножек и LED ленты
Размер крепежа
При сборке применяются крепёжные элементы разных типоразмеров. Установка винтов или стоек несоответствующего размера может привести к повреждению квадрокоптера.
Ячейка 1 Гайка запрессовочная М3 |
Ячейка 2 Гайка нейлоновая М3 |
Ячейка 3 Стойка нейлоновая M2.5 |
Ячейка 4 Гайка нейлоновая М2.5 |
Ячейка 5 Гайка нейлоновая М2 |
Ячейка 6 Винт M3x40 |
Ячейка 7 Винт M3x12 |
Ячейка 8 Винт M3x8 |
Ячейка 9 Винт M3x6 |
Ячейка 10 Винт M3x4 |
Ячейка 11 Стойка алюминиевая M3x40 |
Ячейка 12  Стойка демпферная М3 |
Ячейка 13 Винт M3x10 |
Ячейка 14 Стойка алюминиевая M3x10 |
Ячейка 15 Стойка алюминиевая M3x30 |
Ячейка 16 Винт M2x6 |
Ячейка 17 Винт M2.5x4 |
Ячейка 18 Винт M2.5x6 |
Ячейка 19 Саморез M1.4x4 |
Ячейка 20 Винт M2x3 |
Ячейка 21 Стойка нейлоновая M3x30 |
Ячейка 22 Стойка нейлоновая M3x20 |
Ячейка 23 Стойка нейлоновая M3x40 |
Ячейка 24  Саморез M1.4x10 |
Ячейка 25 Ножка из TPU |
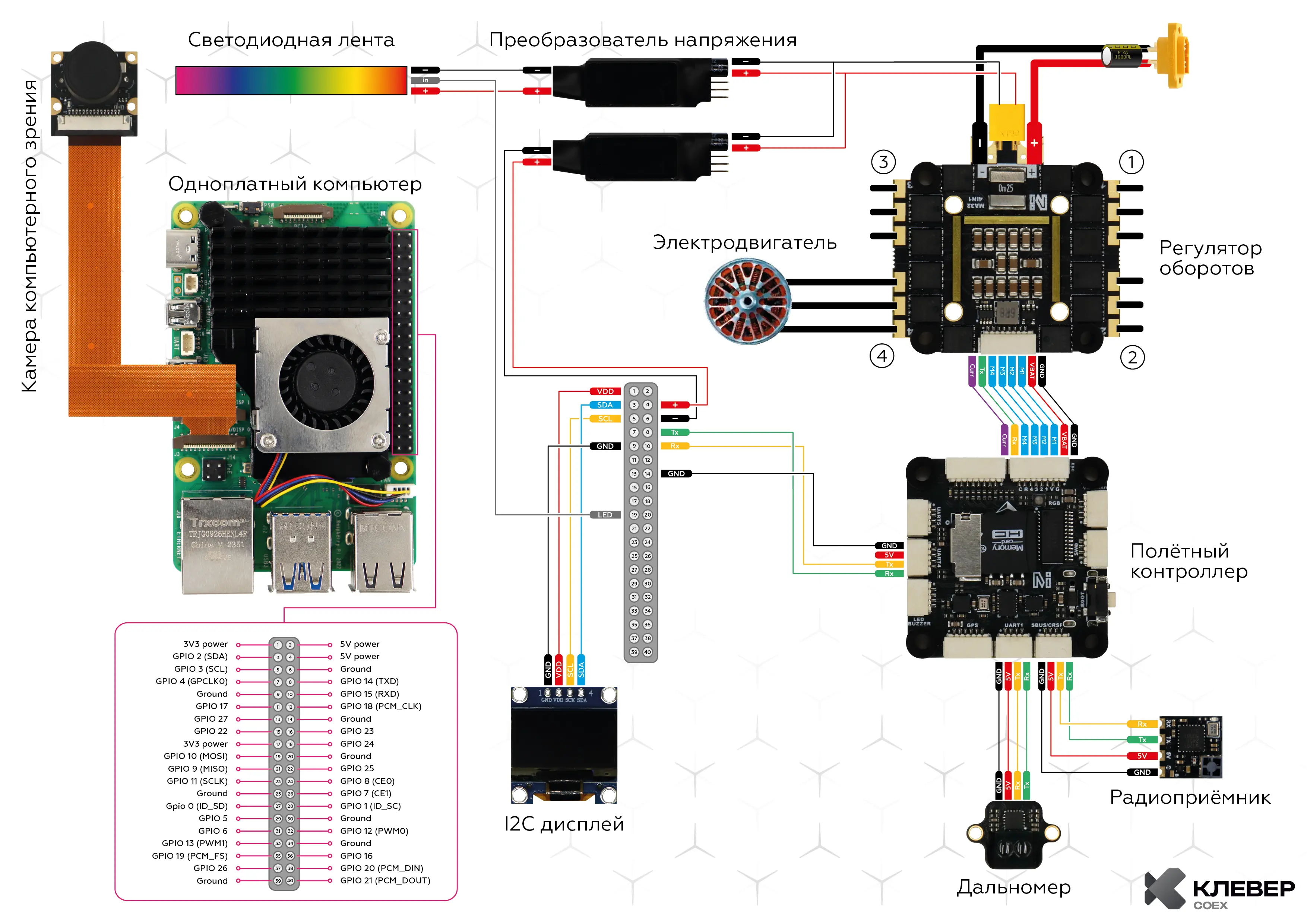
Схема подключения электроники
Сборка рамы
Совместите 4 луча между средней и нижней декой.
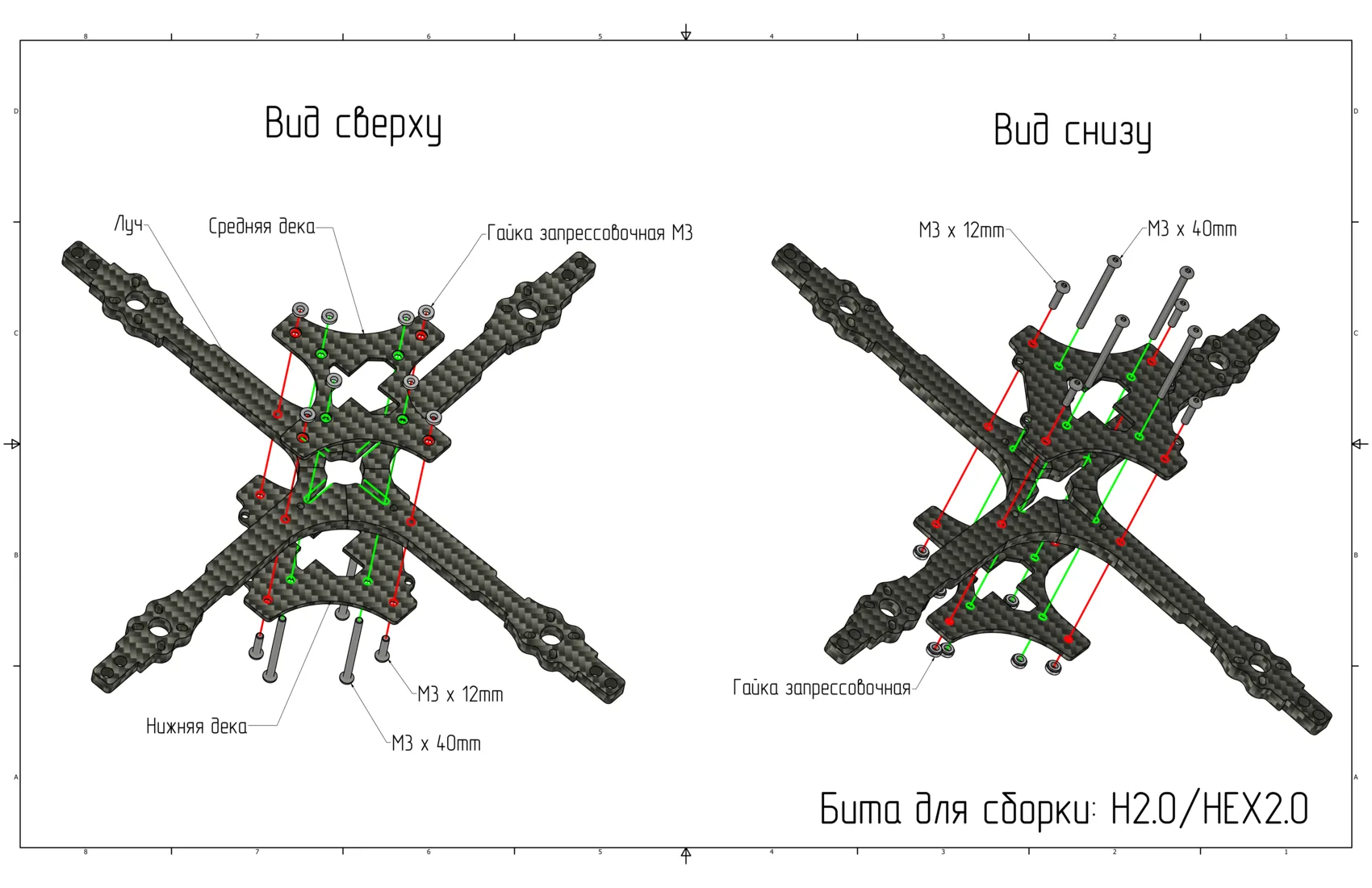
Установите винты M3x12 (Ячейка 7) и M3x40 (Ячейка 6) со стороны нижней деки, M3x12 (Ячейка 7) в крайние отверстия лучей, M3x40 (Ячейка 6) в центральные отверстия нижней деки.
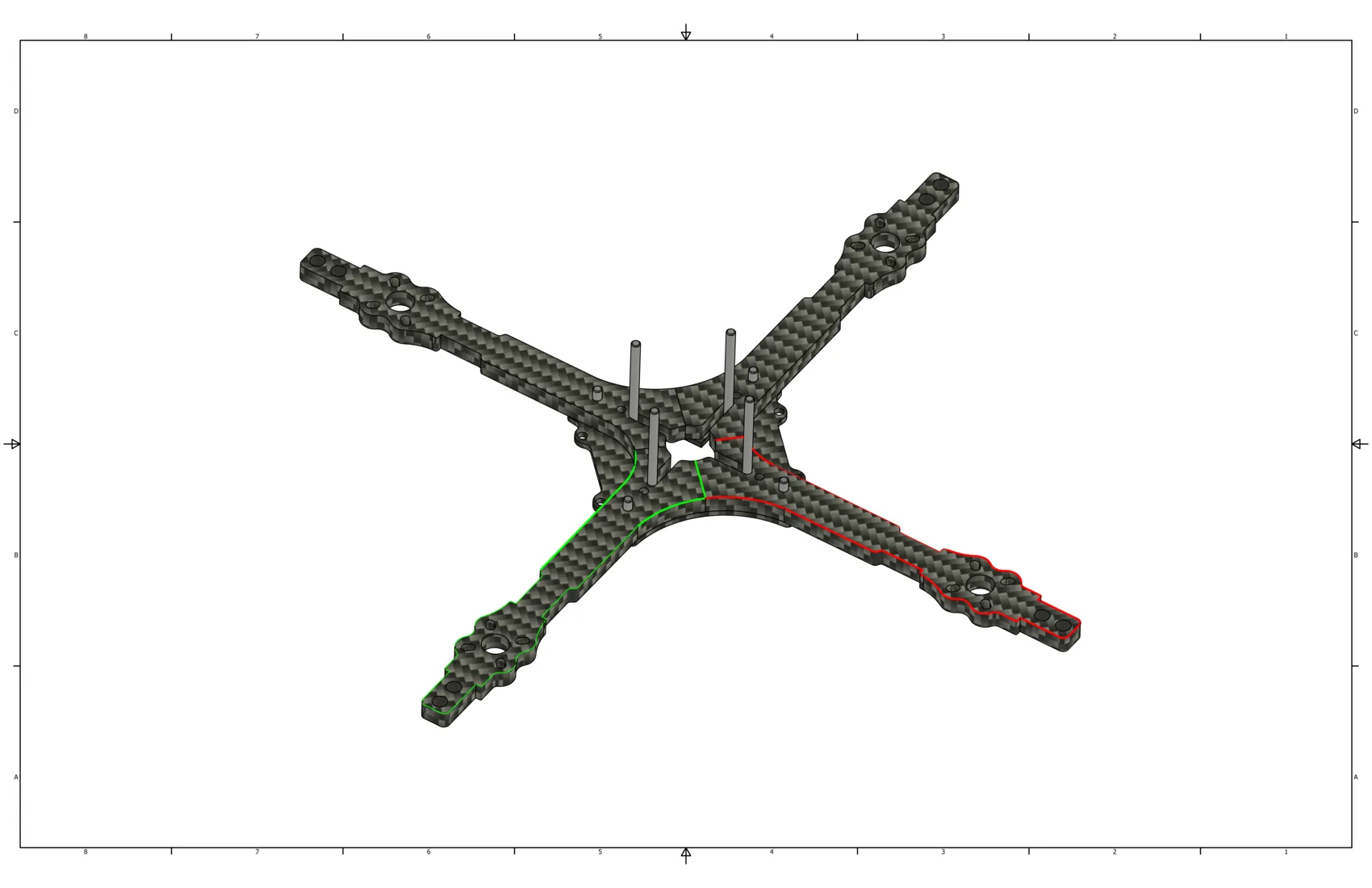
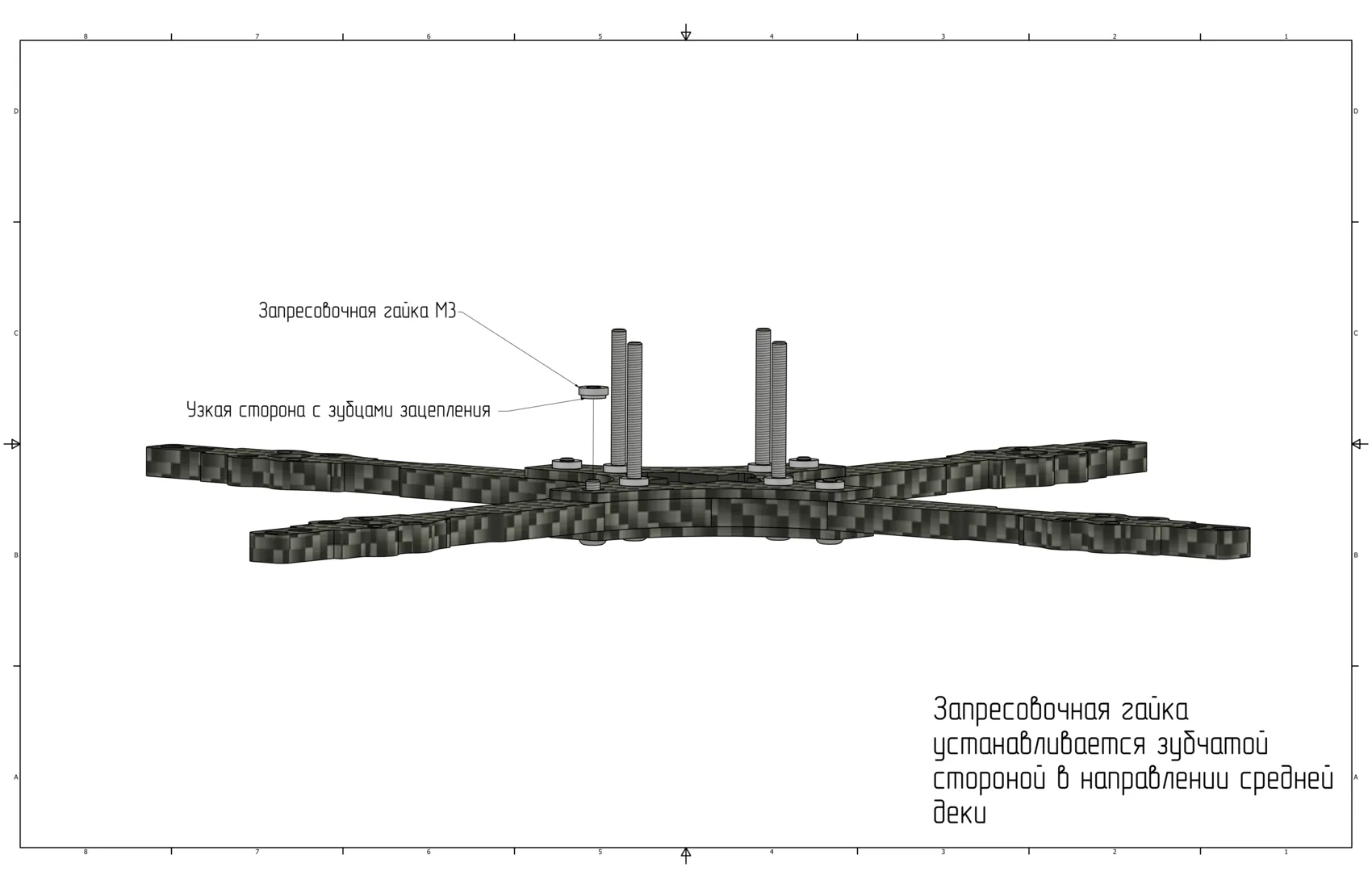
На средней деке установите запрессовочные гайки М3 (Ячейка 1) и зафиксируйте их винтами.
Установка моторов
Установите моторы в соответствующие отверстия в луче с помощью винтов М3х8 (Ячейка 8).
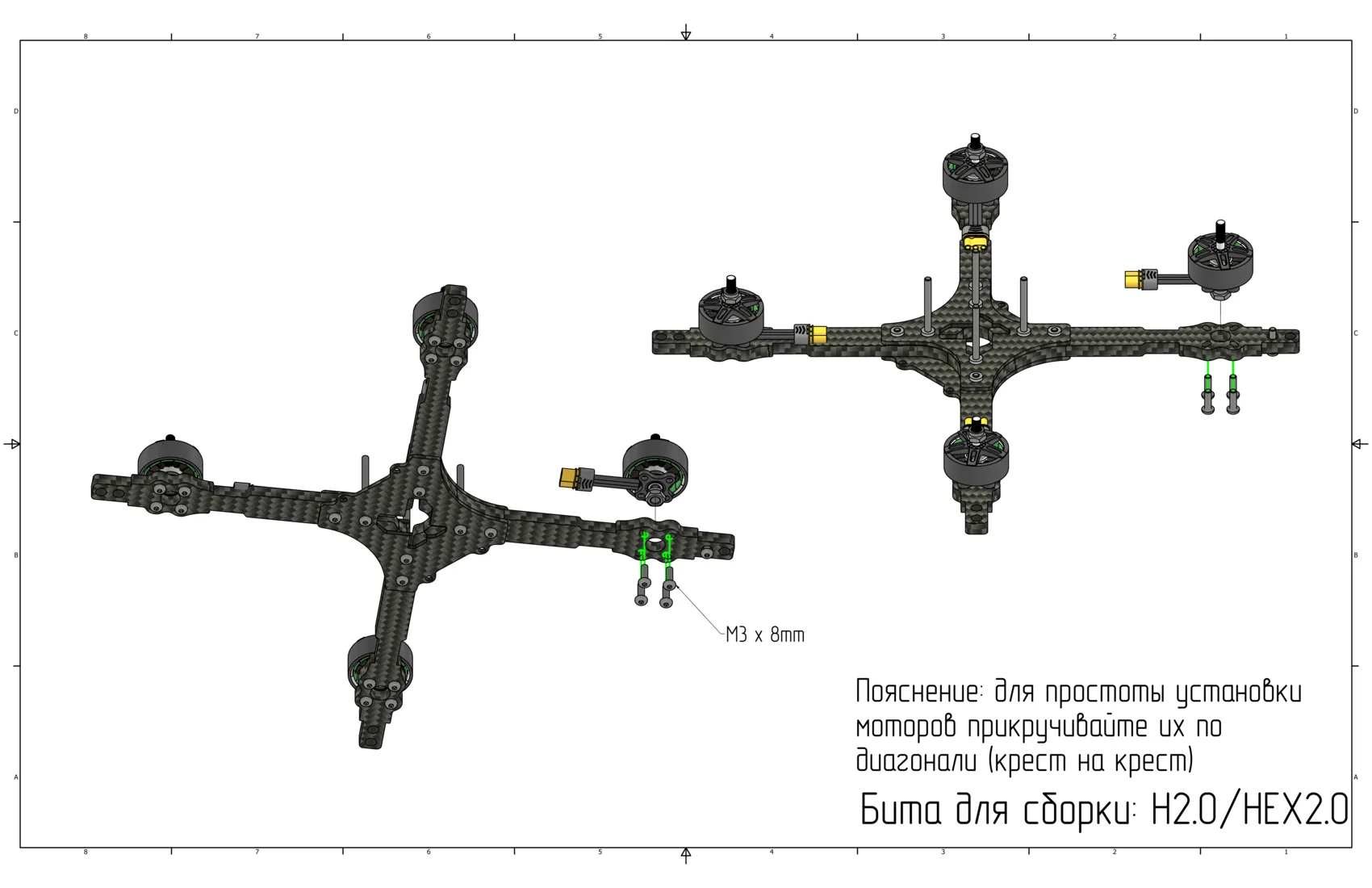
Убедитесь, что моторы закреплены с помощью винтов М3х8, в противном случае может возникнуть короткое замыкание между обмотками.
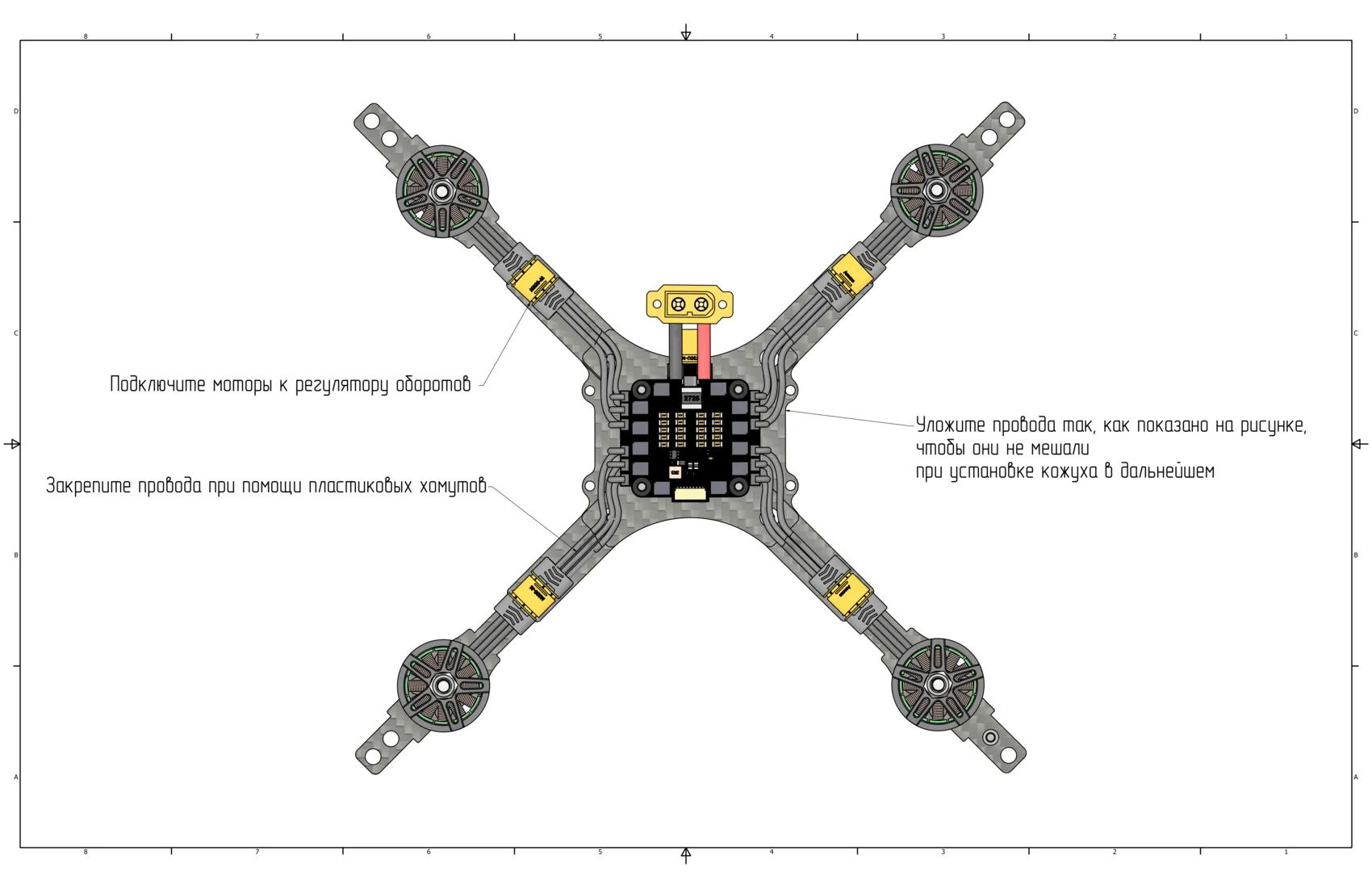
Установка ESC
Установите регулятор оборотов (ESC) поверх винтов M3x40 (Ячейка 6) на средней деке. Разъем питания аккумулятора должен быть направлен назад.
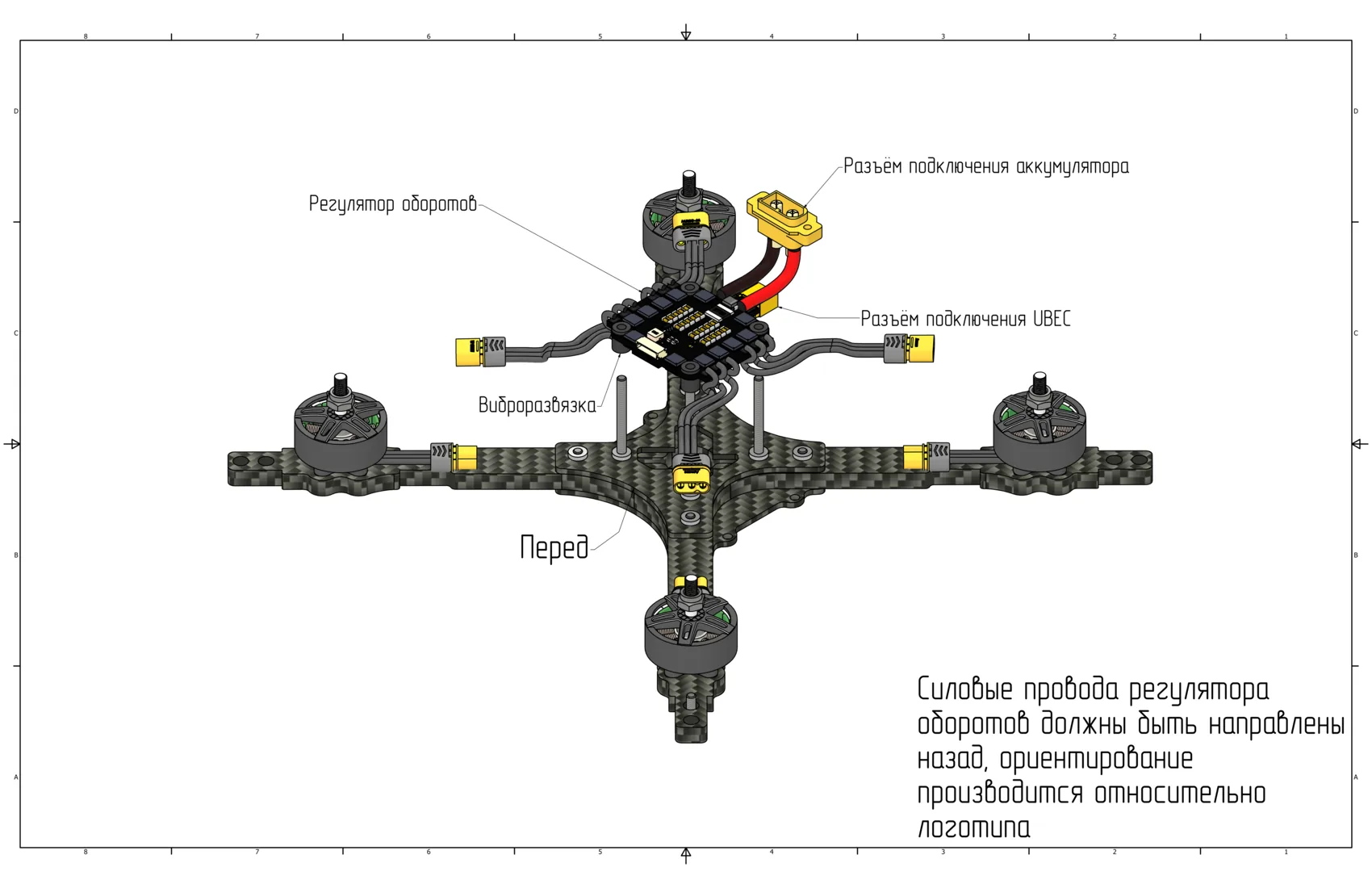
Подсоедините к моторам разъемы MR30 от регулятора оборотов (ESC), уложите провода так, как показано на рисунке, после чего закрепите их на лучах с помощью пластиковых хомутов.
Установка алюминиевых стоек
Установите алюминиевые стойки M3x40 (Ячейка 11) на среднюю деку с помощью демпферных стоек М3 (Ячейка 12).
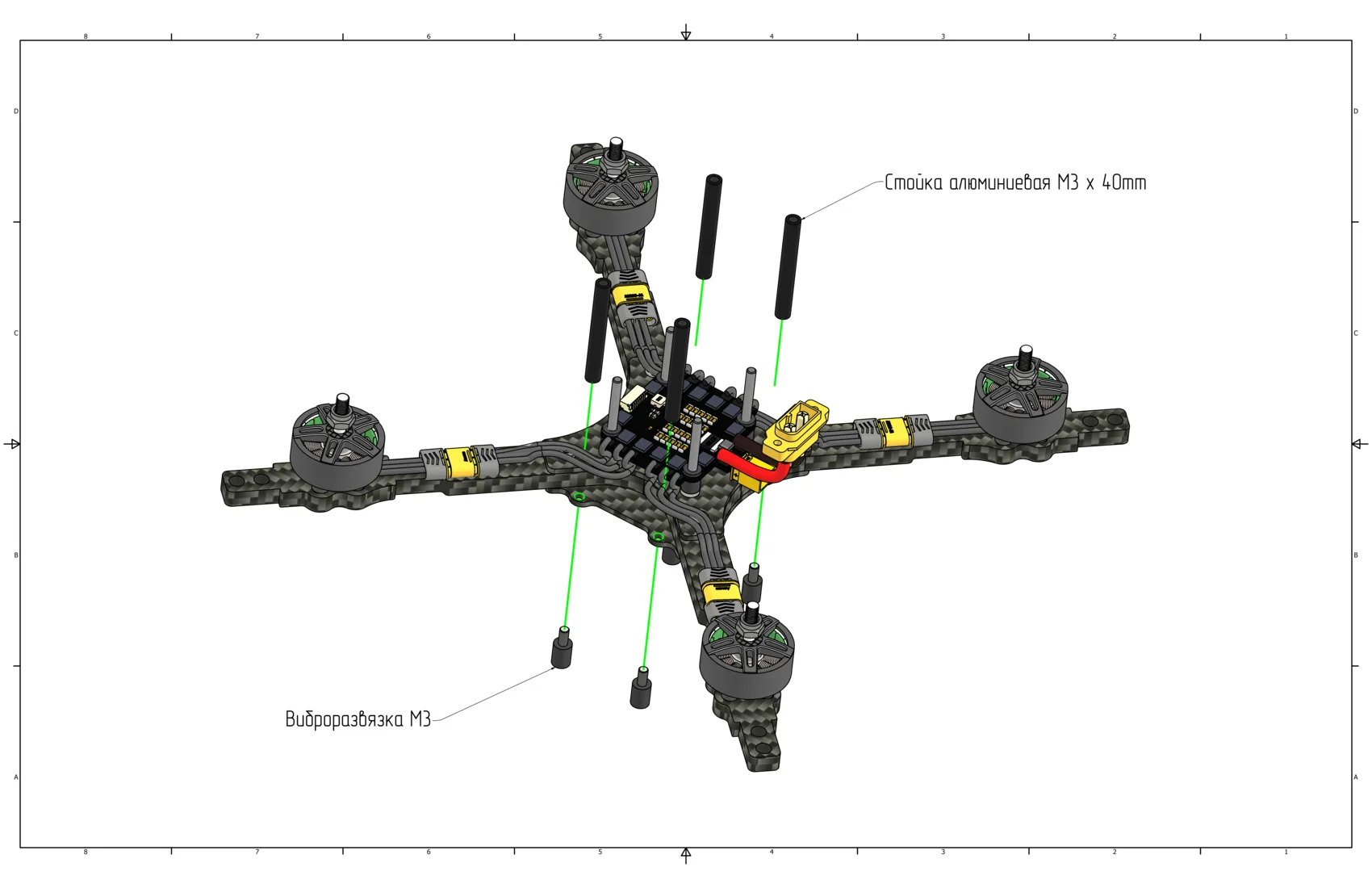
Закрутите демпферные стойки со стороны нижней деки.
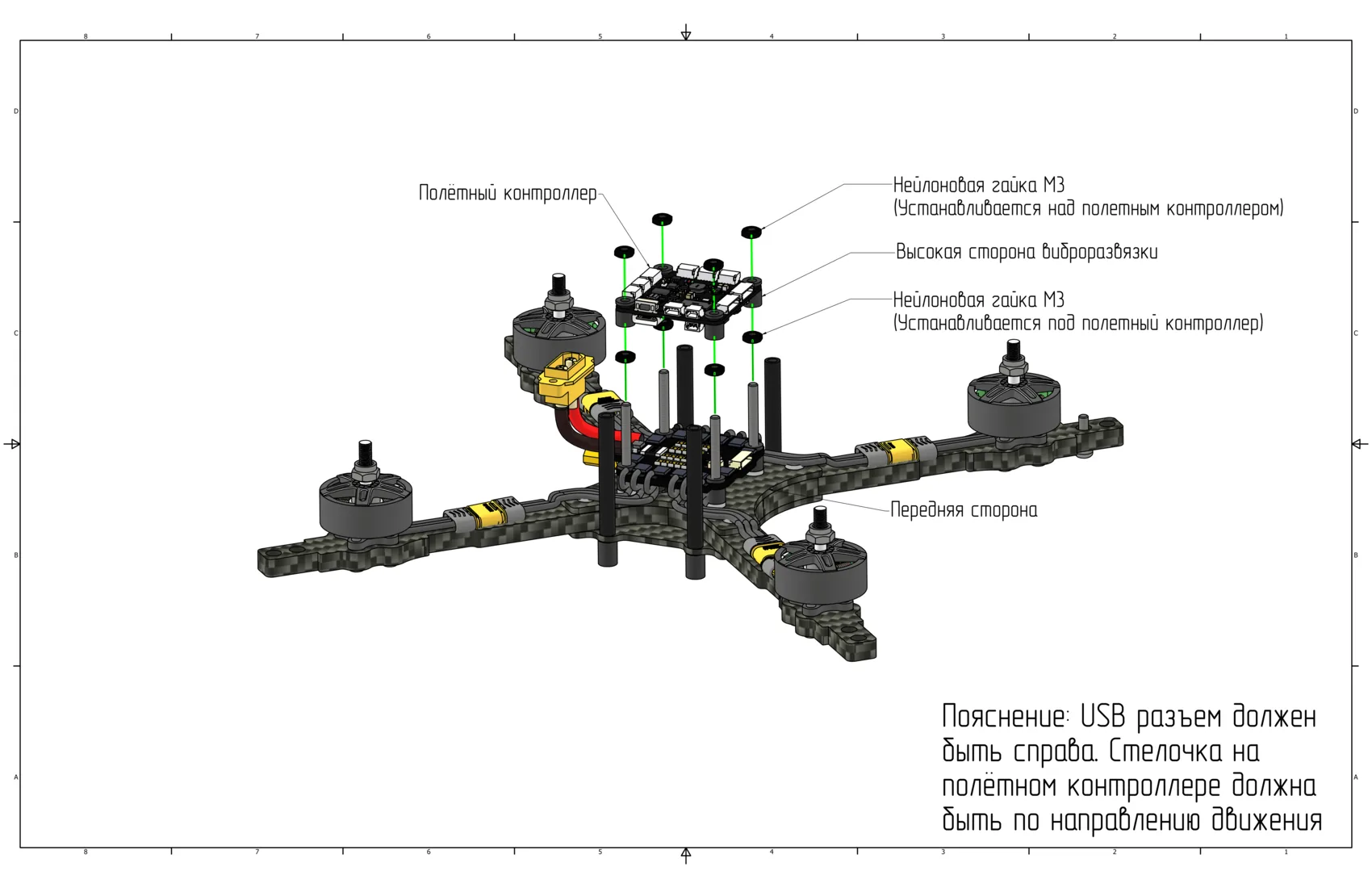
Установка полетного контроллера
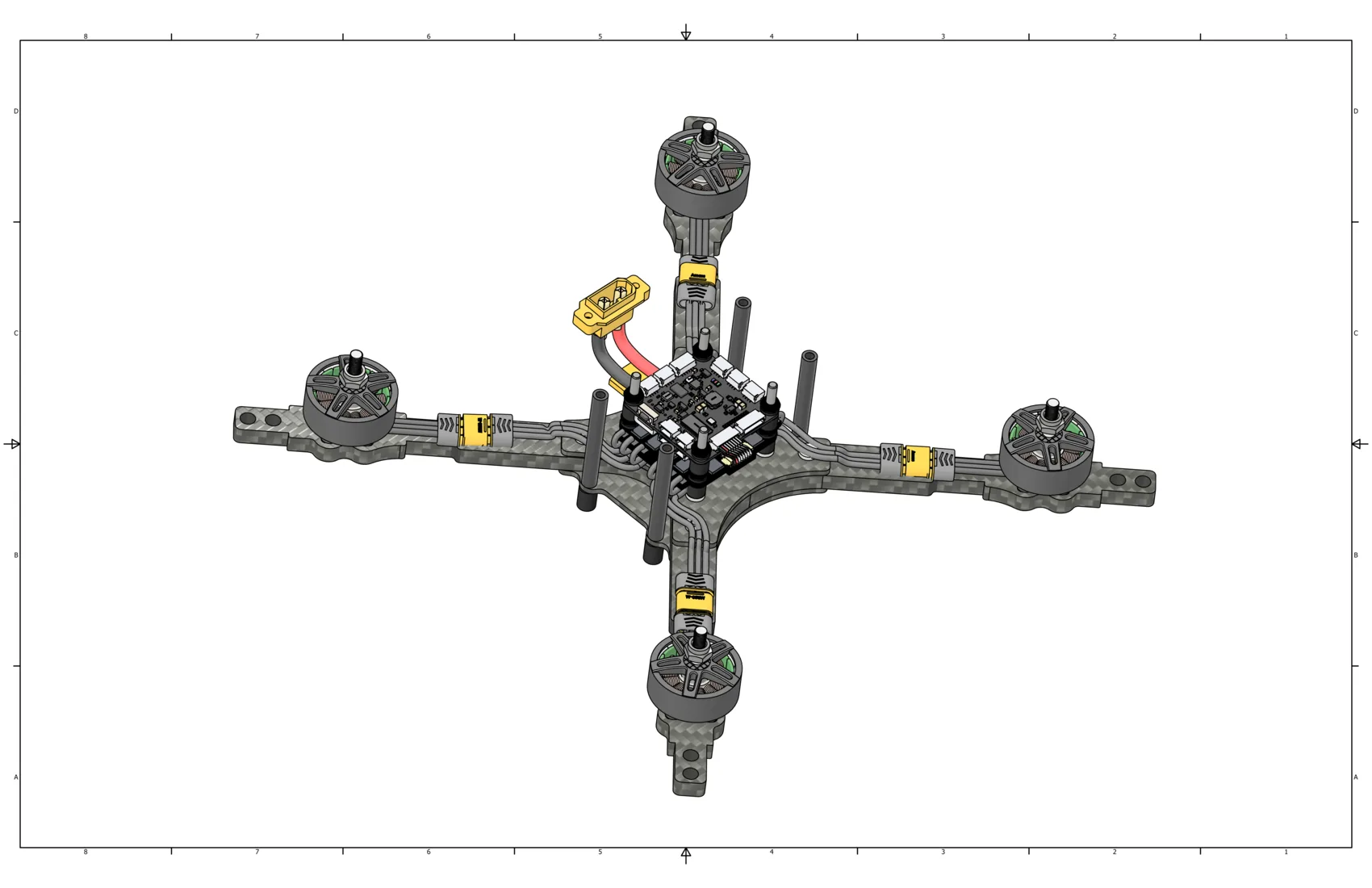
Перед установкой полетного контроллера, накрутите нейлоновые гайки M3 (Ячейка 2) на винты M3x40 (Ячейка 6), после чего установите полетный контроллер стрелкой вперед. Установите нейлоновые гайки для фиксации полетного контроллера.
Установите 6-пиновый шлейф между полетным контроллером и регулятором оборотов (ESC).
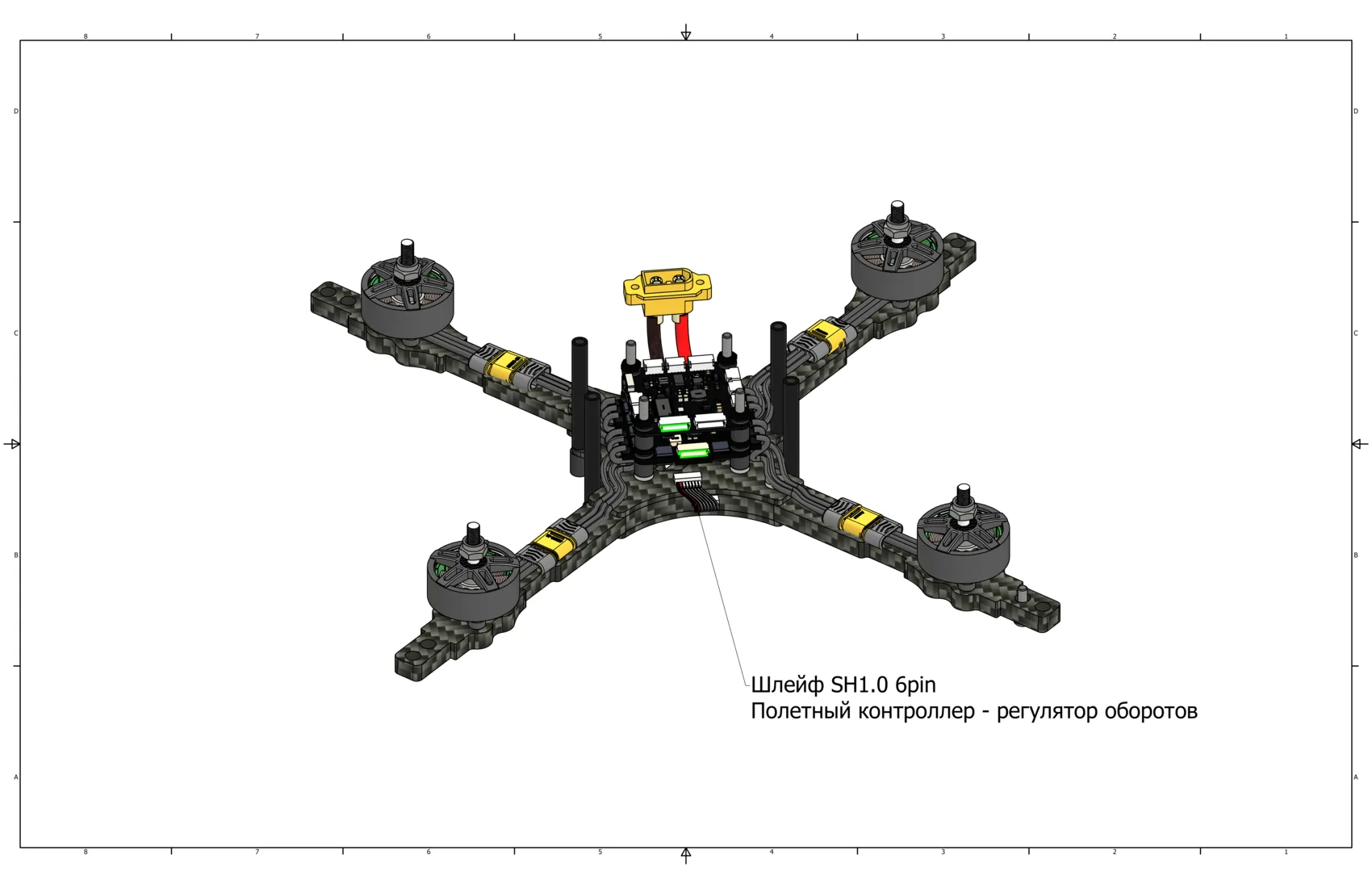
Вид с установленным шлейфом.
Установка Raspberry Pi
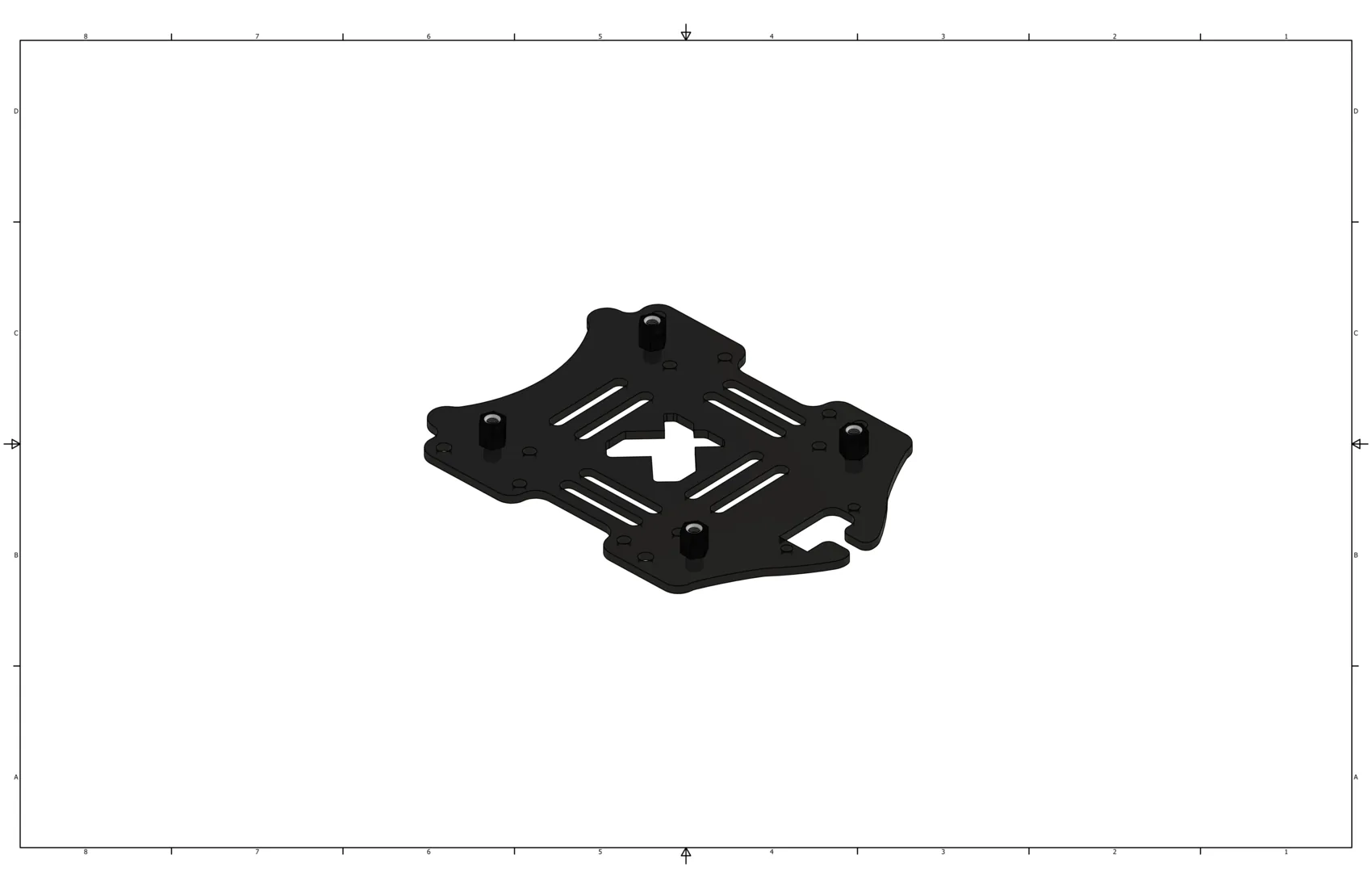
Установите на монтажную деку из поликарбоната стойки M2.5 (Ячейка 3) с помощью винтов M2.5x4 (Ячейка 17).
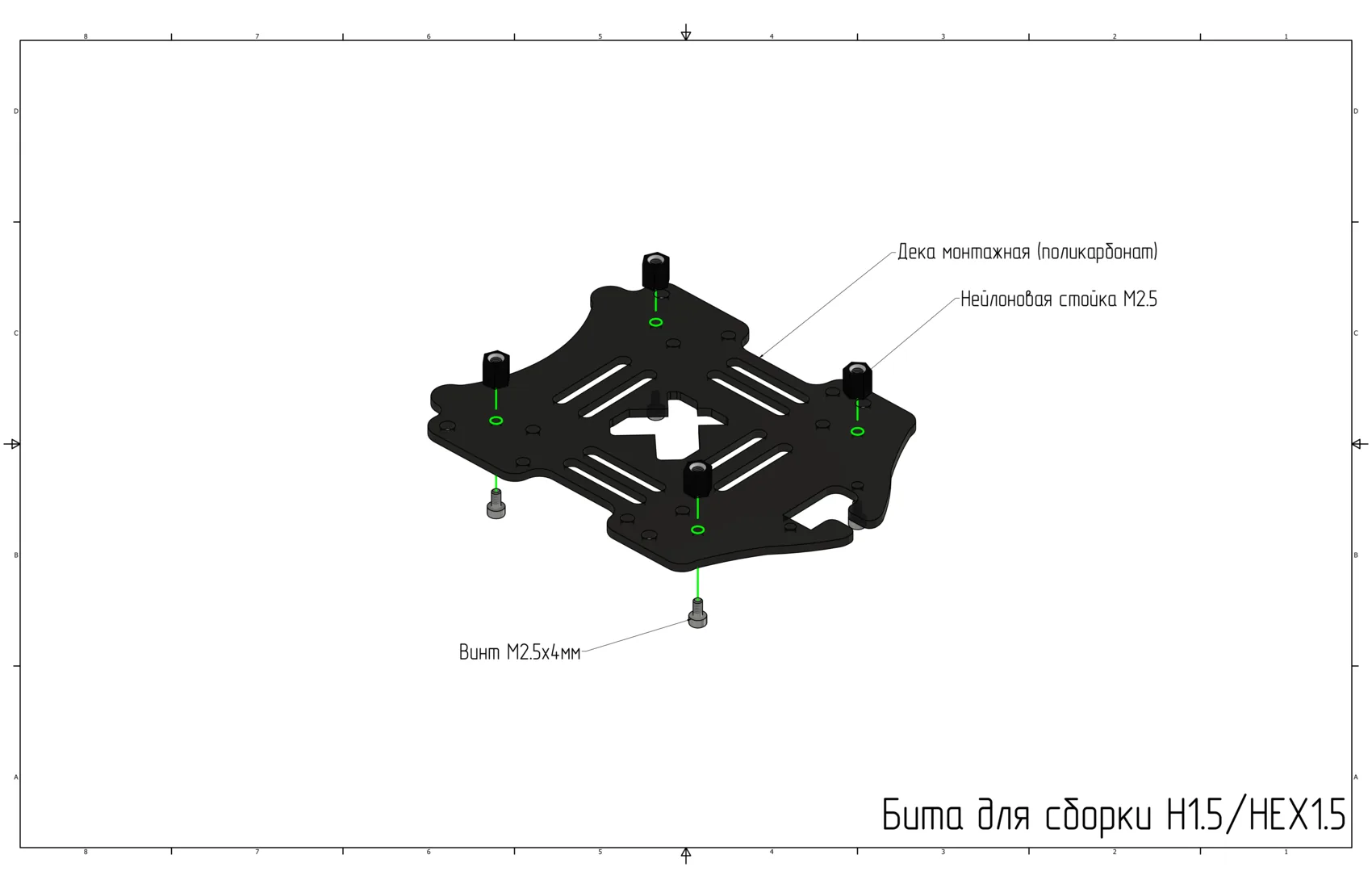
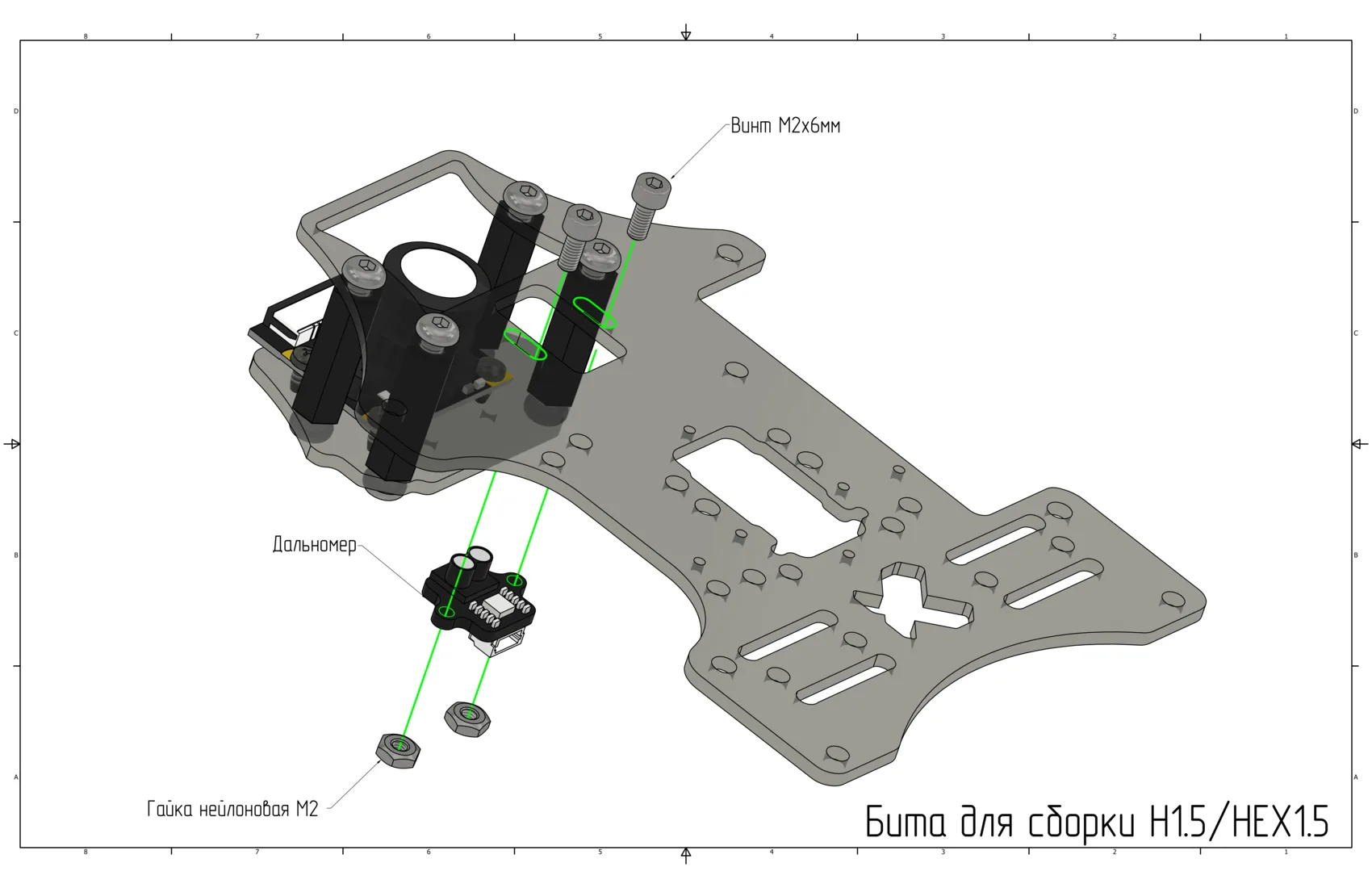
Закрутите винты. Используйте биту H1.5/HEX1.5.
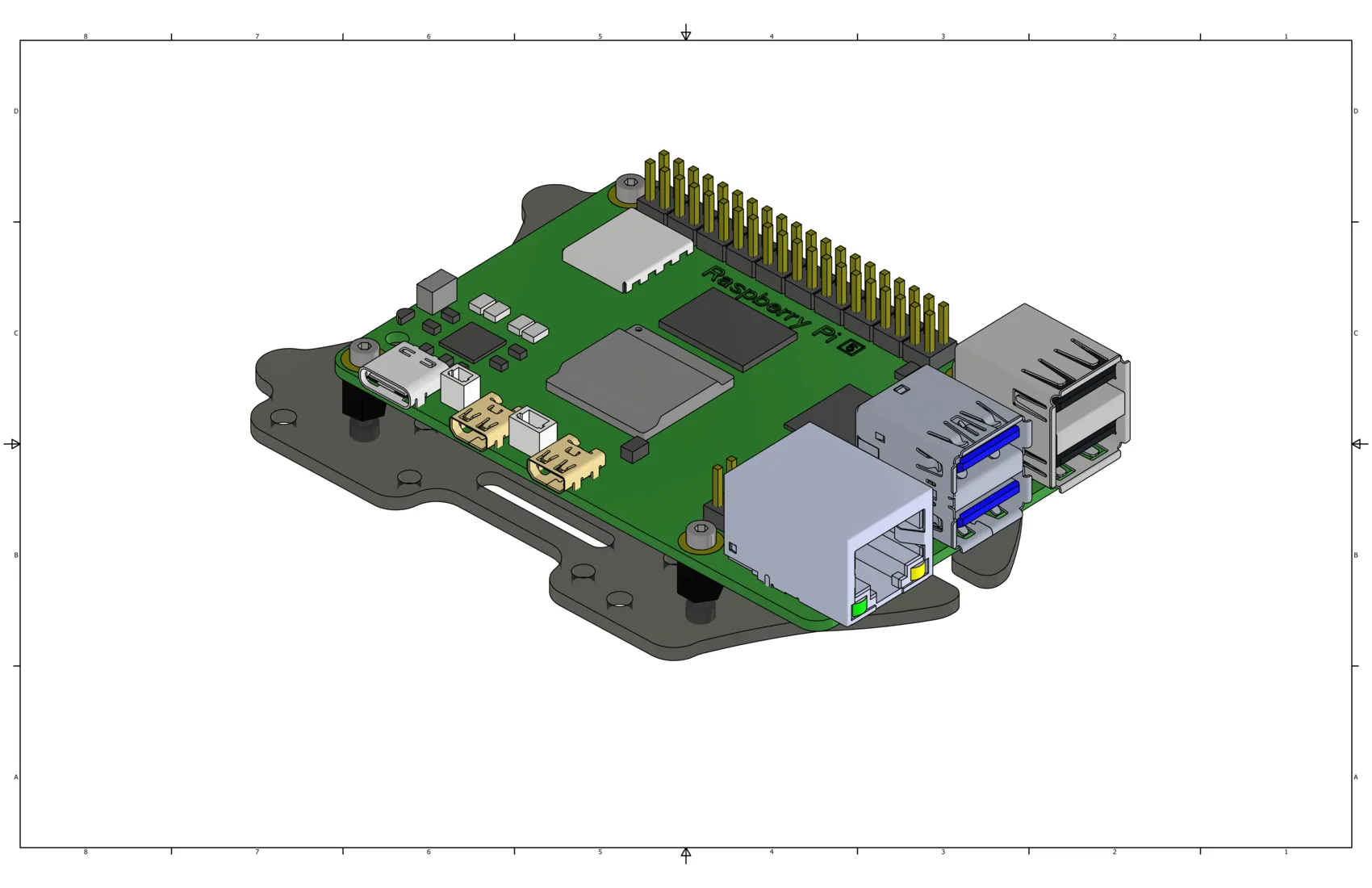
Установите Raspberry pi 5 поверх стоек M2.5.
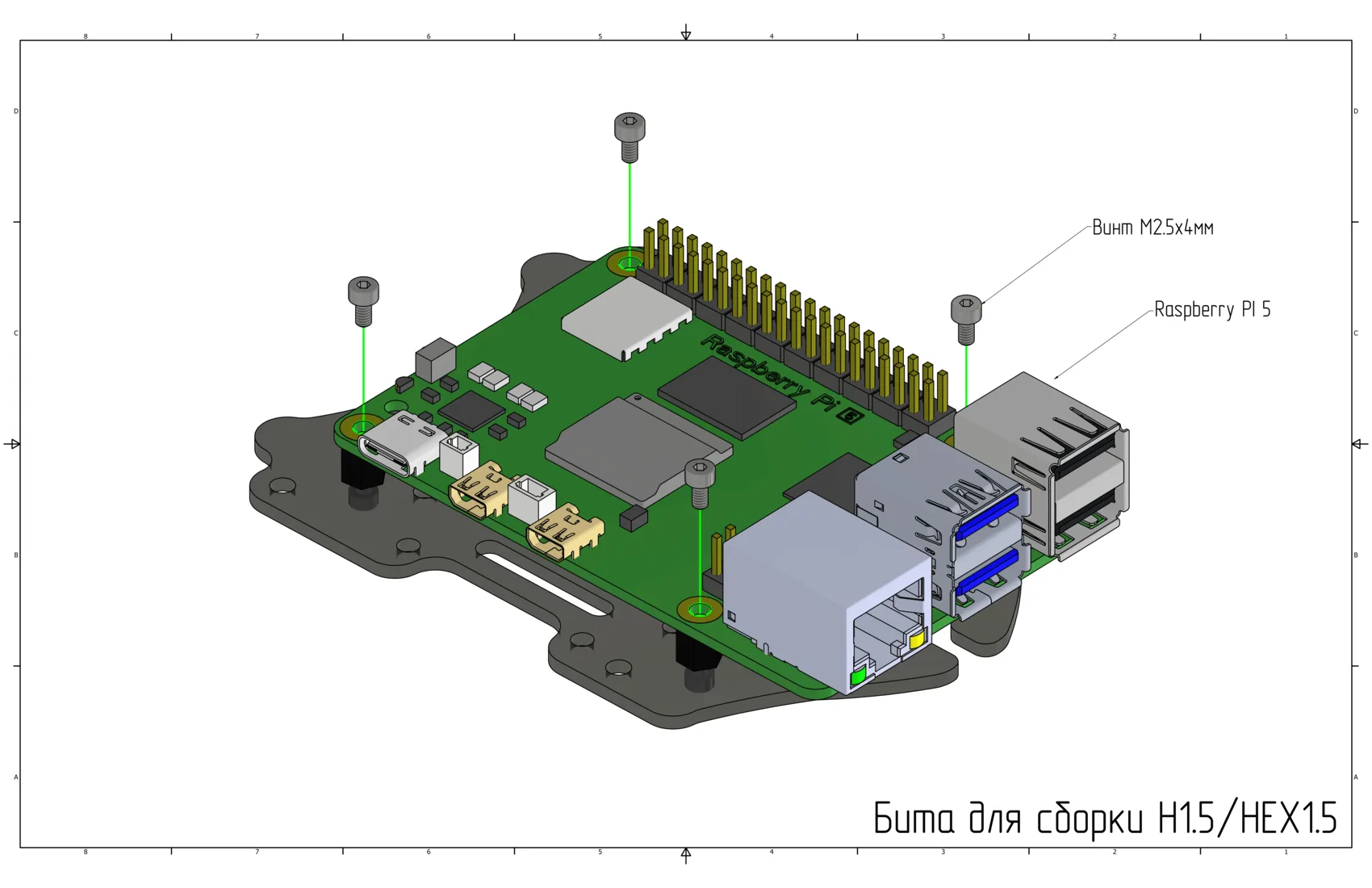
Зафиксируйте плату Raspberry Pi 5 с помощью винтов М2.5х4 (Ячейка 17).
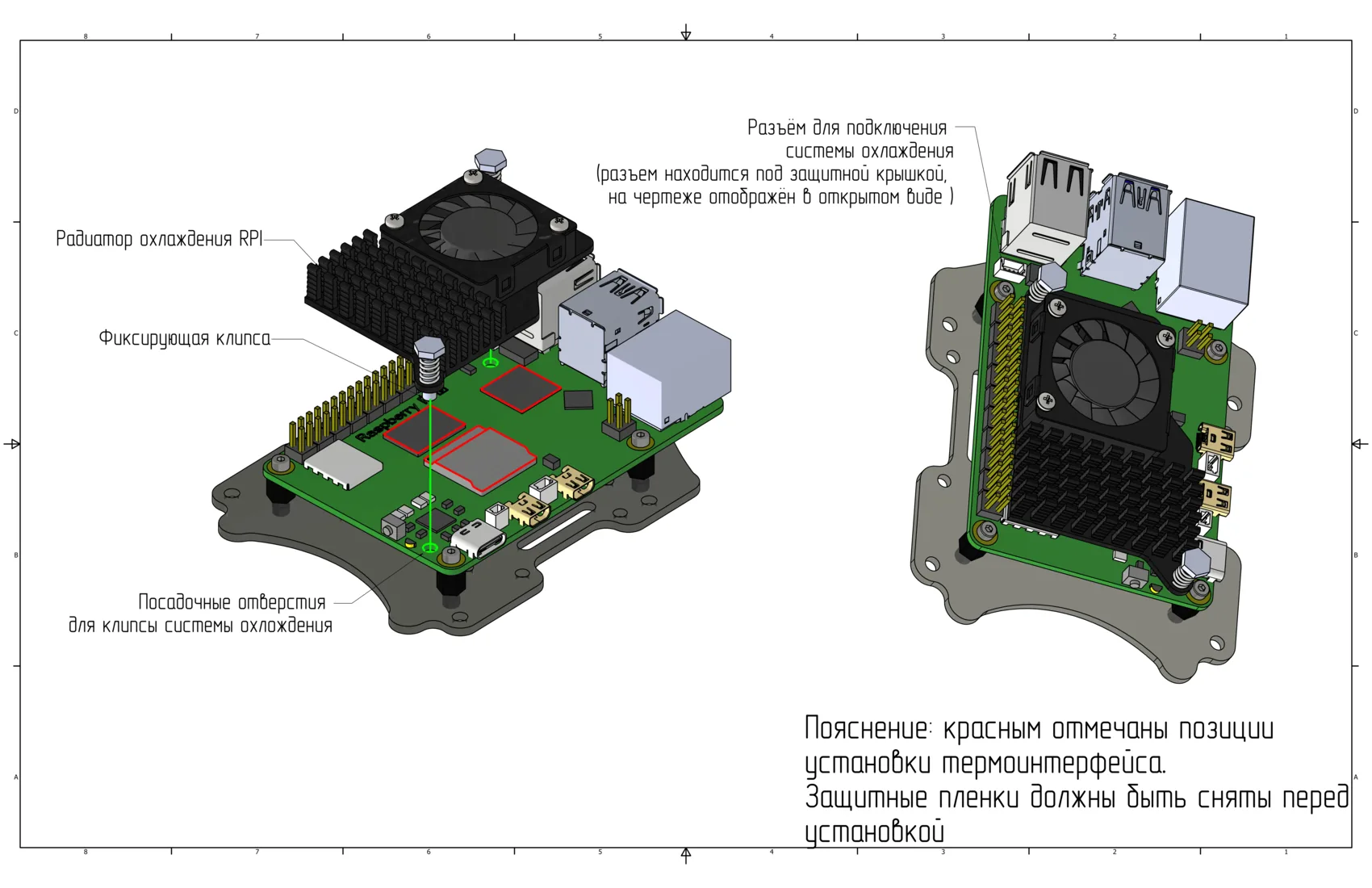
Снимите пленки с термопрокладок и установите их на выделенные позиции на изображении. Установите радиатор охлаждения на Raspberry pi, для этого вставьте фиксирующие клипсы через радиатор в Raspberry pi. Подключите систему охлаждения в порт отмеченный на изображении.
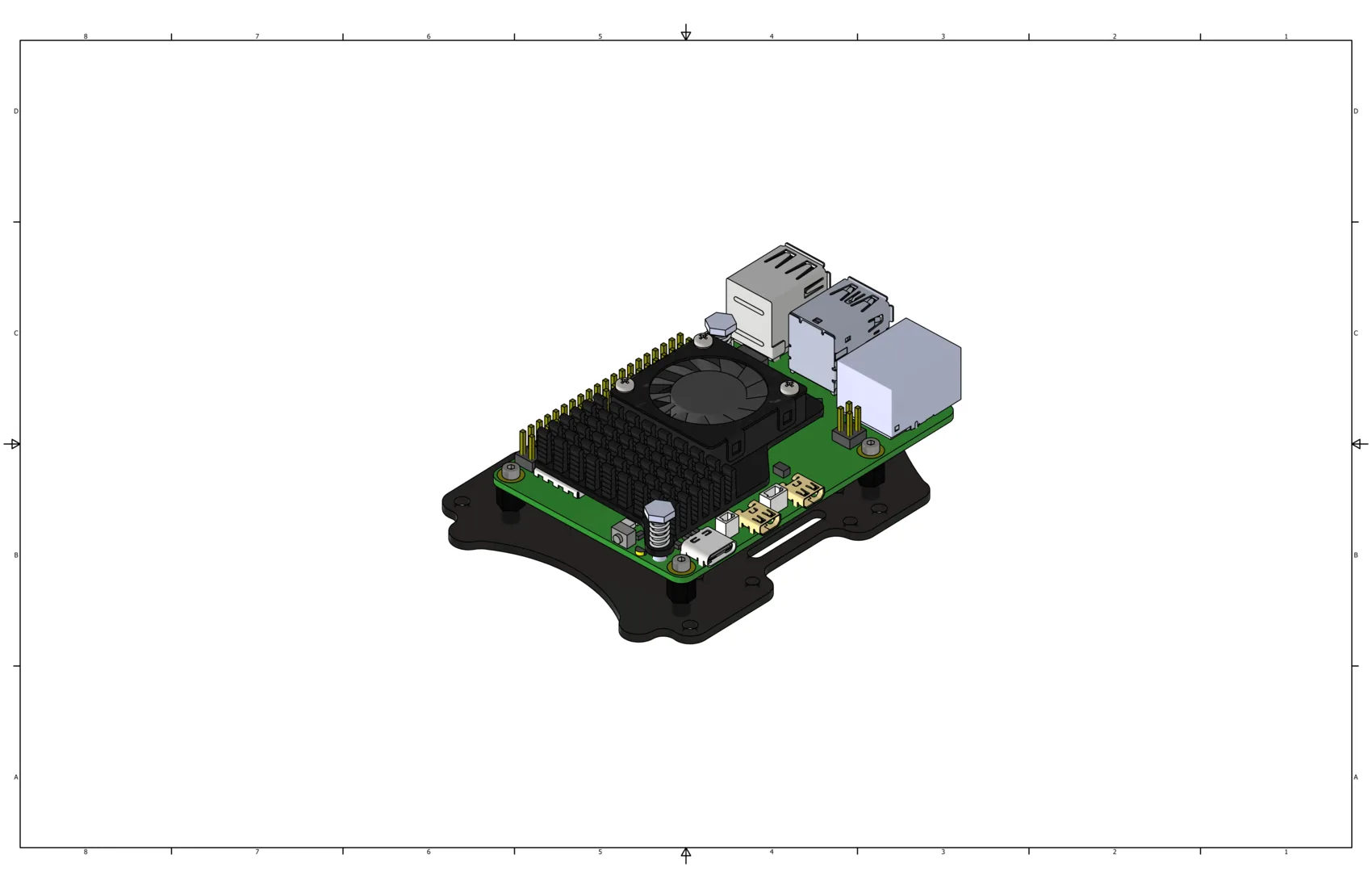
Raspberry Pi с радиатором в сборе.
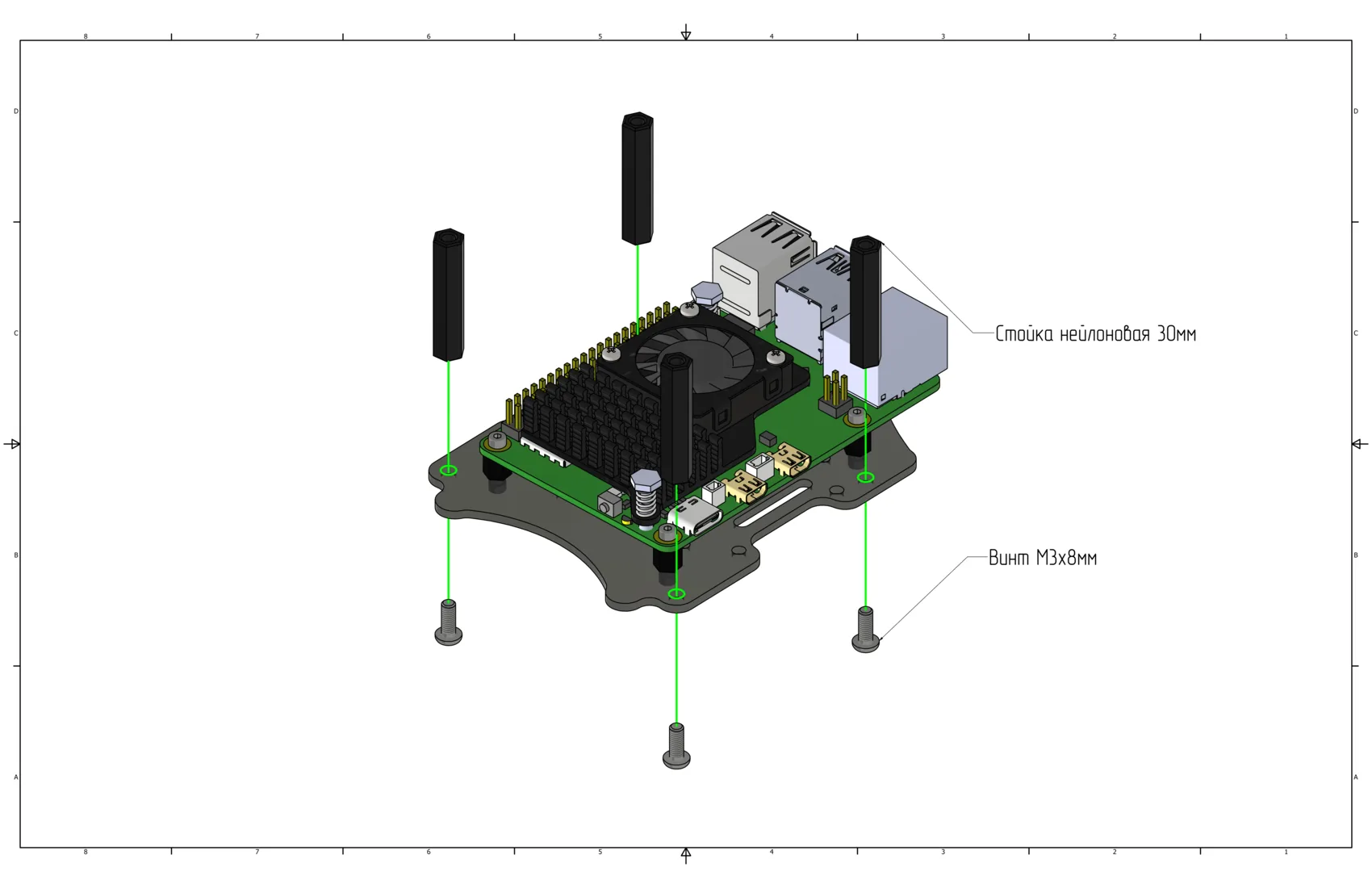
Установите нейлоновые стойки 30мм (Ячейка 21) на деку с Raspberry pi с помощью винтов M3x8 (Ячейка 8).
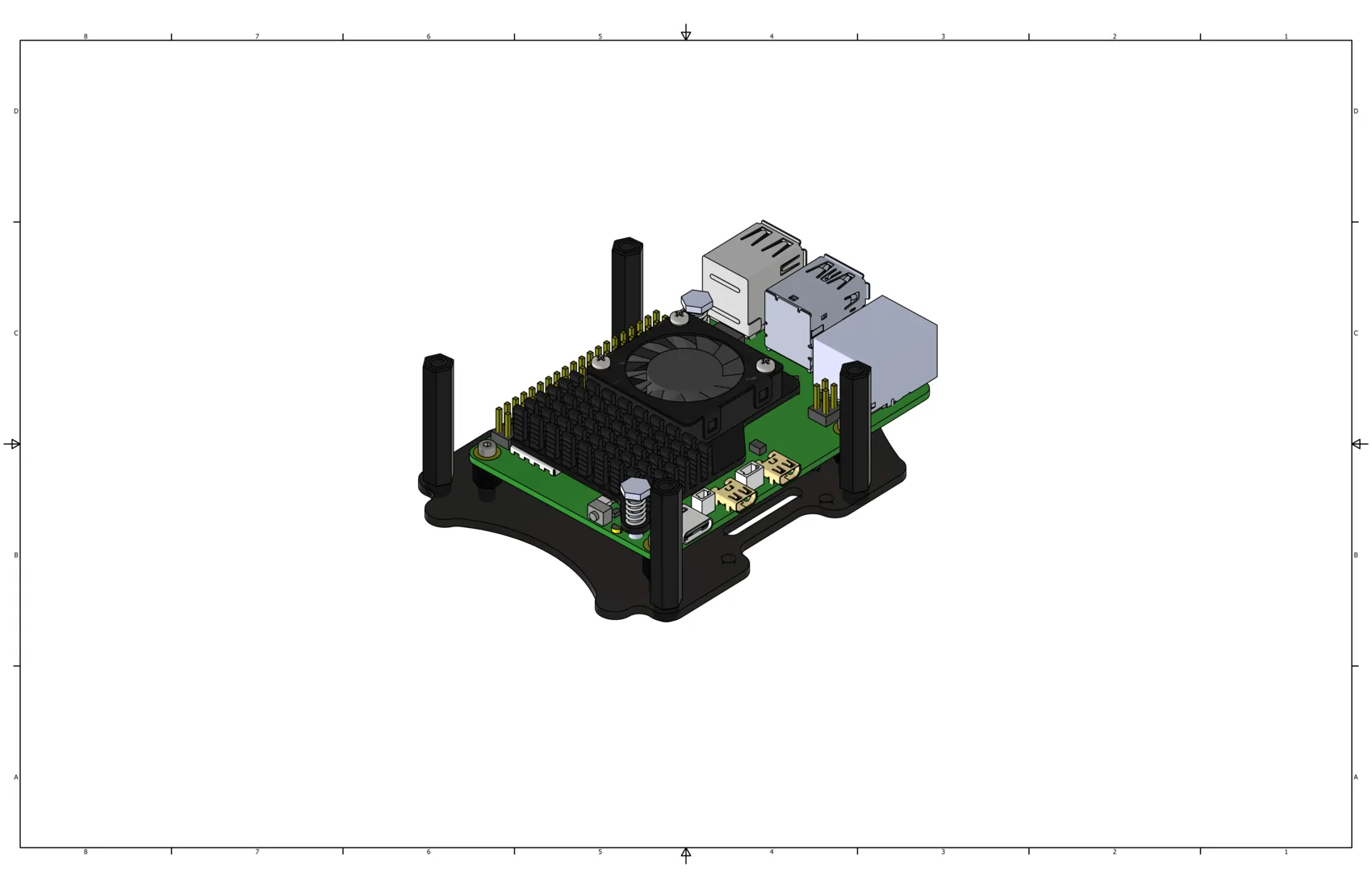
Вид с установленными нейлоновыми стойками.
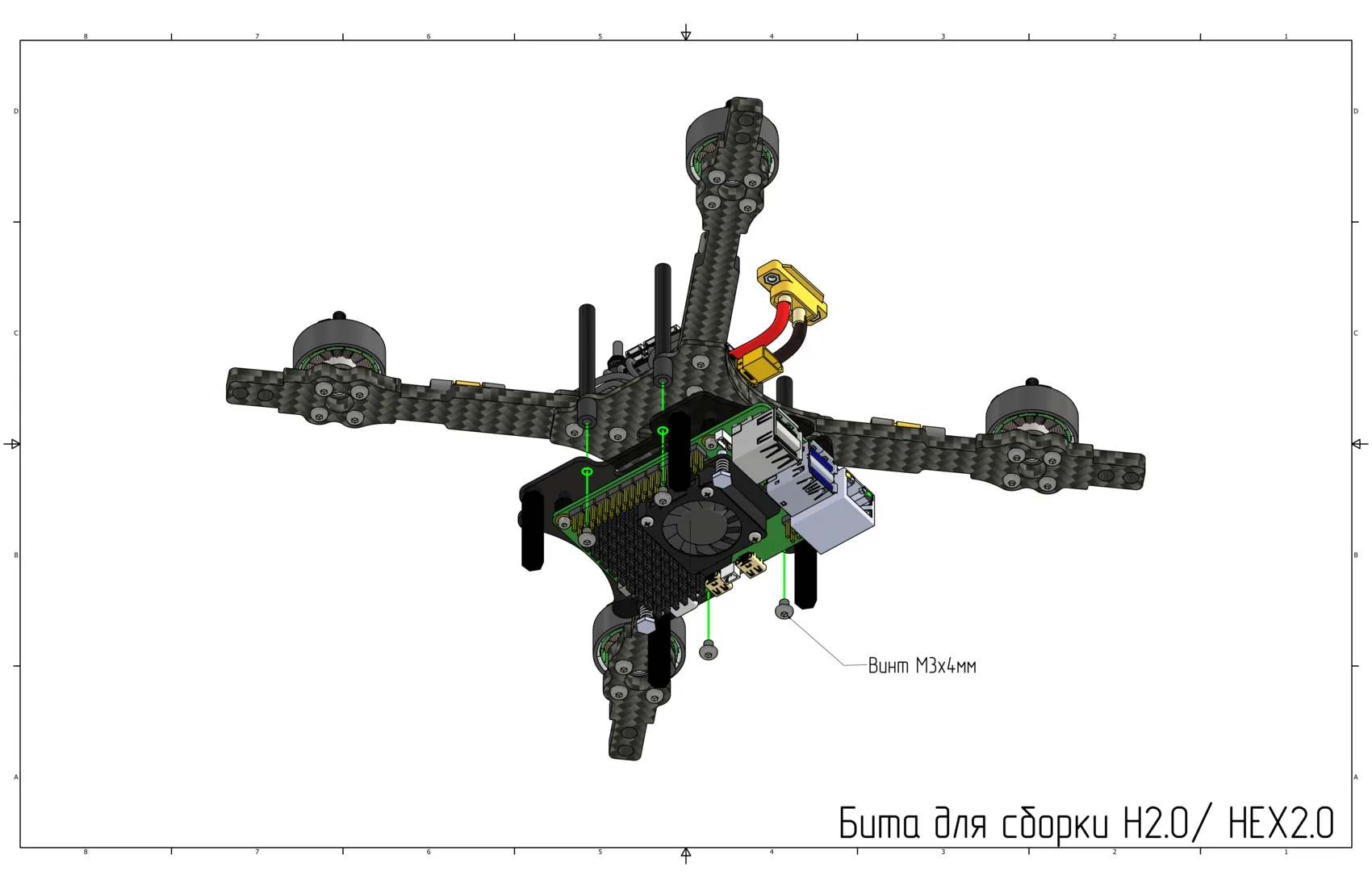
Установите собранную деку c Raspberry pi на нижнюю часть квадрокоптера в демпферные стойки, зафиксируйте на винты M3x4 (Ячейка 10).
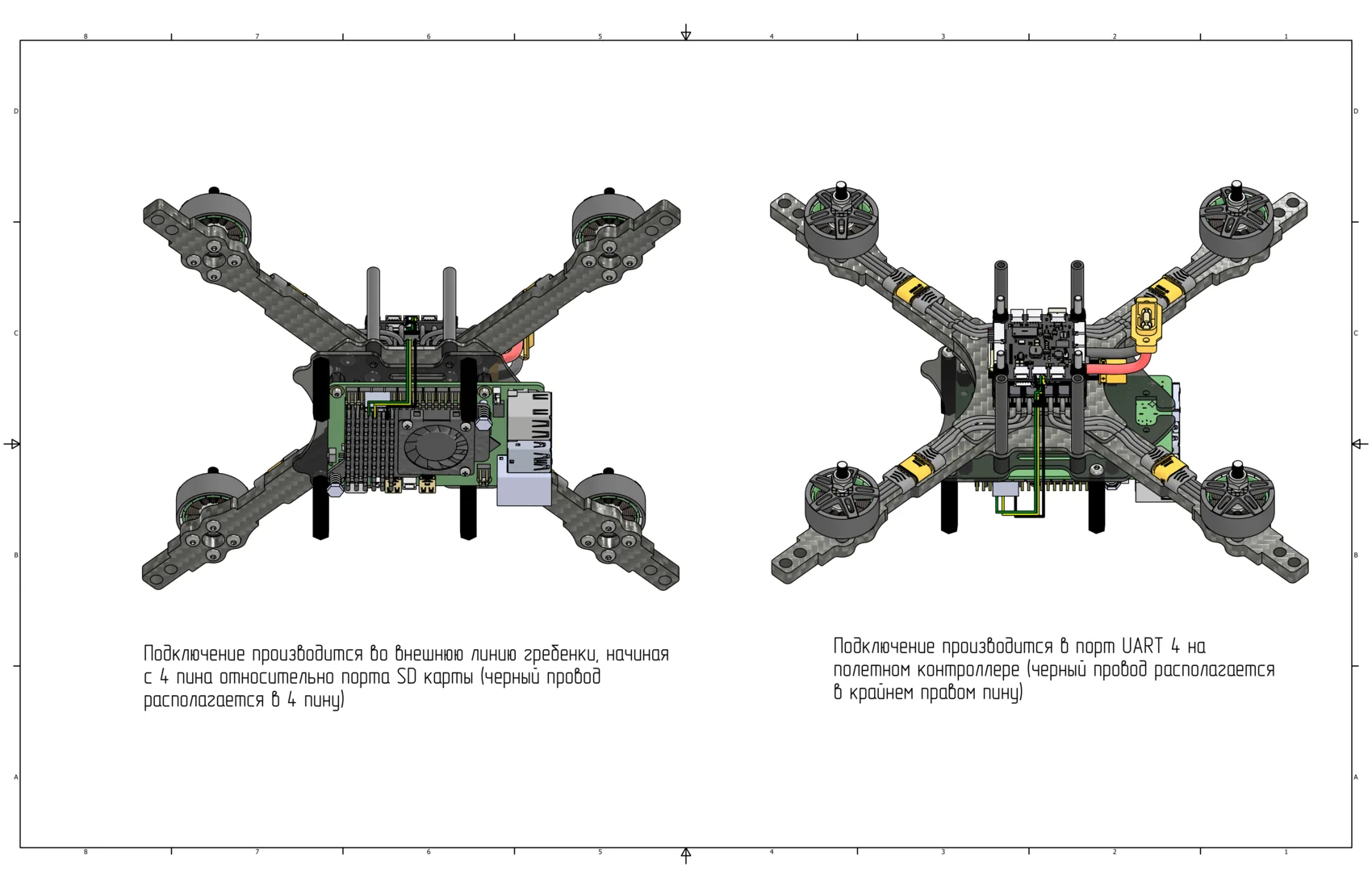
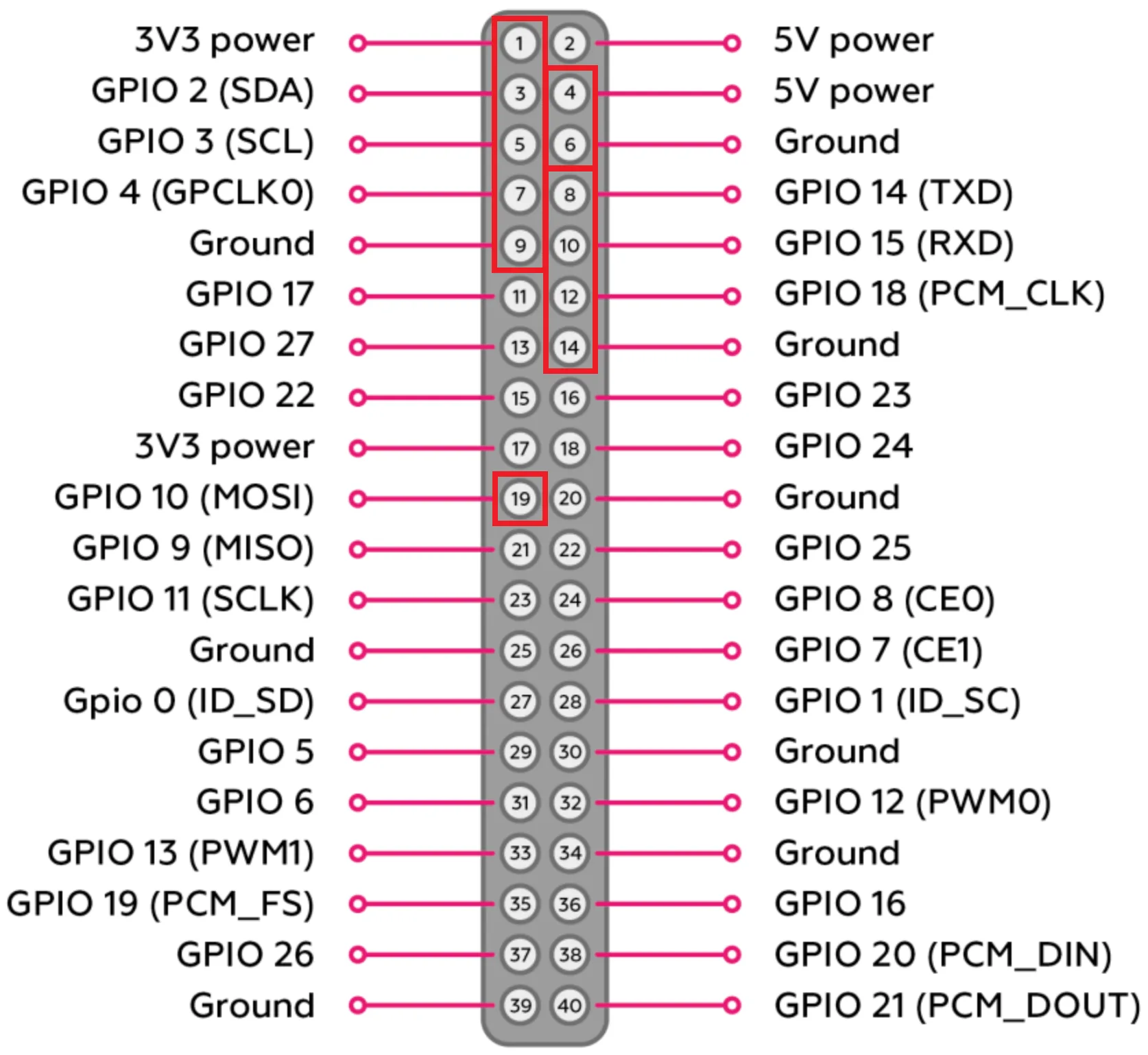
Подключите к Raspberry шлейф передачи данных. Подключение производится во внешнюю линию гребенки, начиная с 4 порта относительно порта SD карты(черный провод в 14 порту, см. pinout). Подключение ответной части производится в порт UART 4 на полетном контроллере(черный провод распологается в крайнем правом углу).
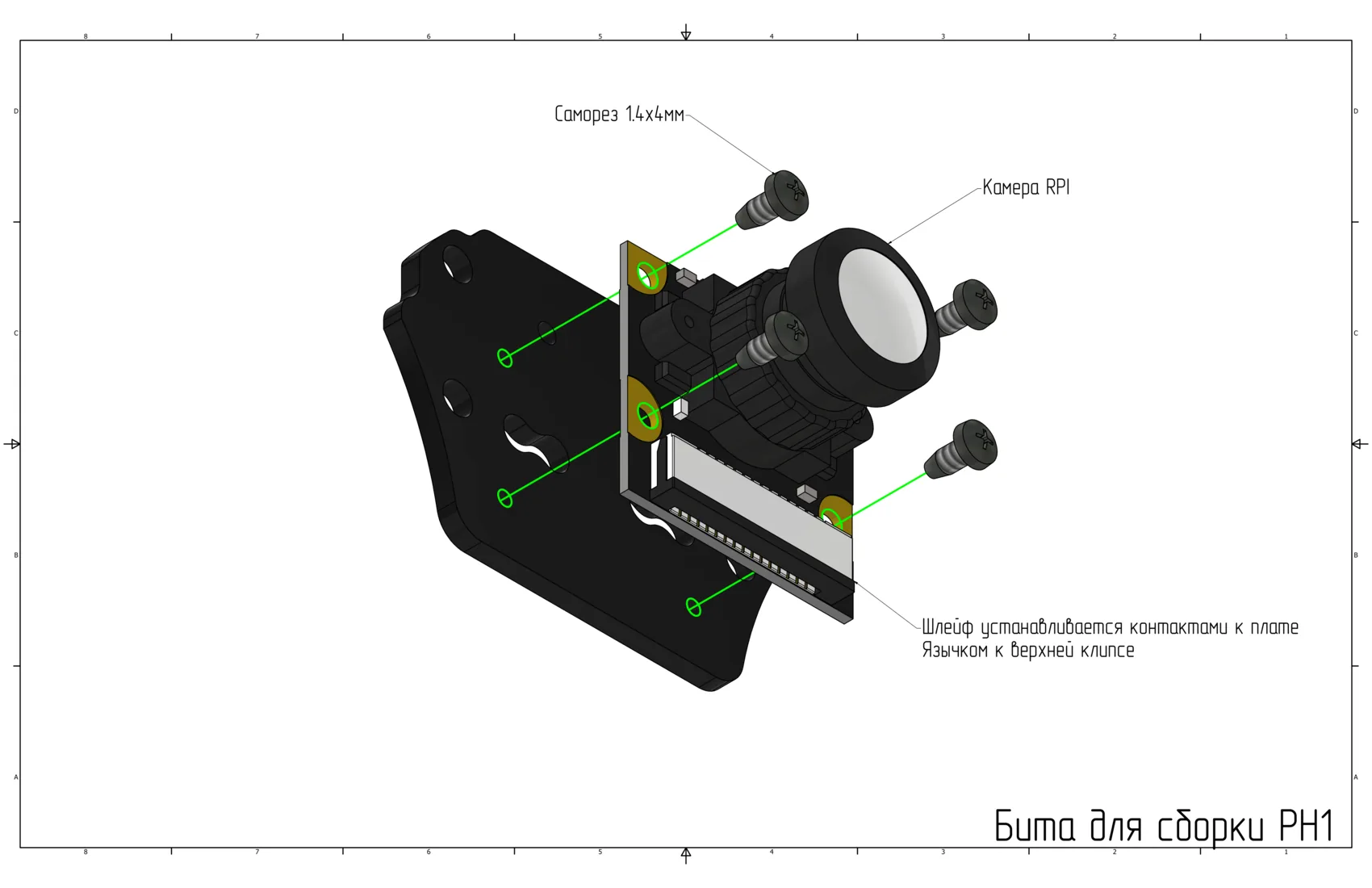
На малую монтажную деку установите камеру так, как показано на изображении ниже, после чего зафиксируйте ее с помощью 2х саморезов М1.4х4 (Ячейка 19), в верхнем левом и нижнем правом углах. Бита для сборки PH1.
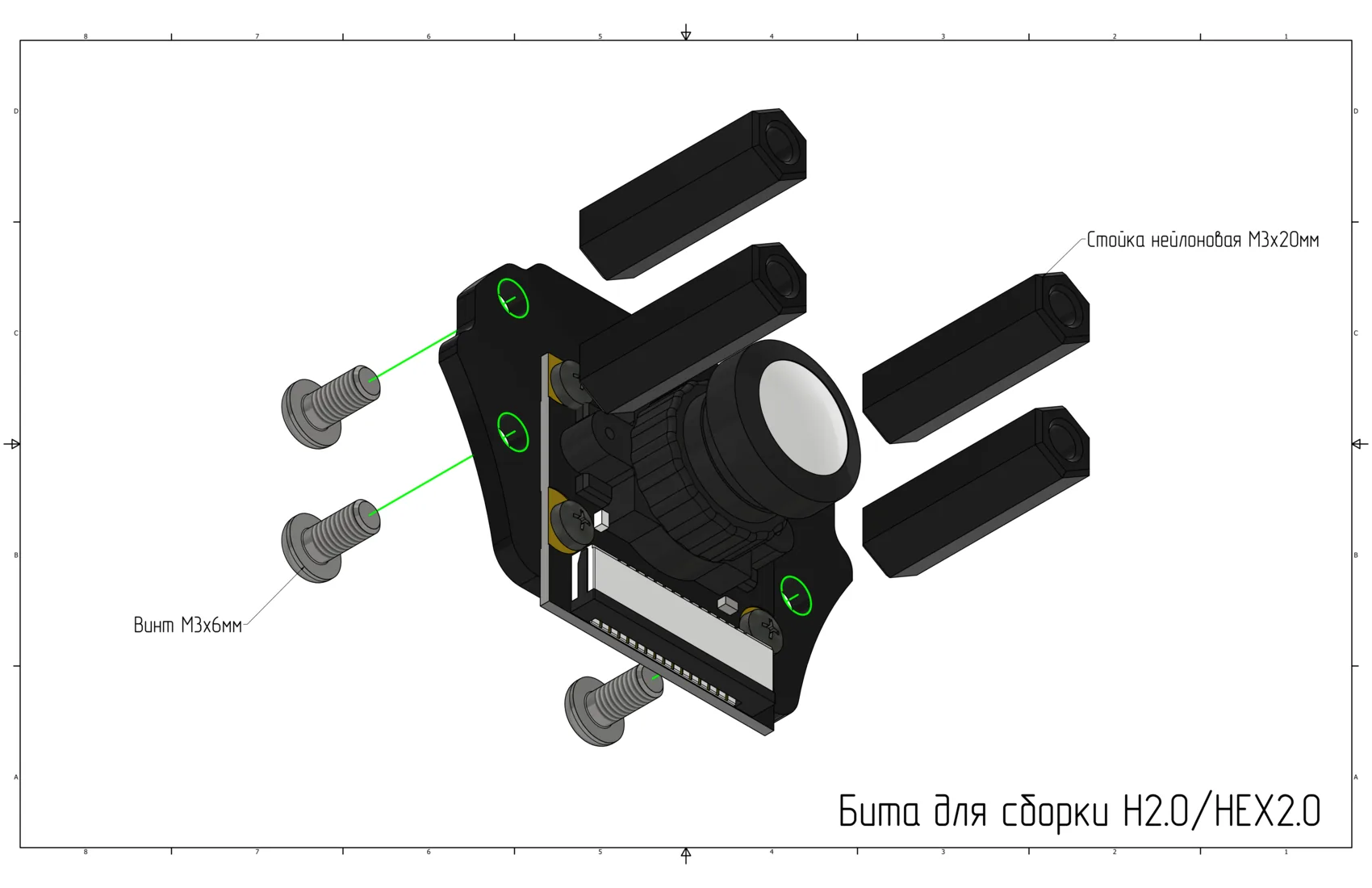
На малую монтажную деку установите нейлоновые стойки 20мм (Ячейка 22) и зафиксируйте винтами M3x6 (Ячейка 9).
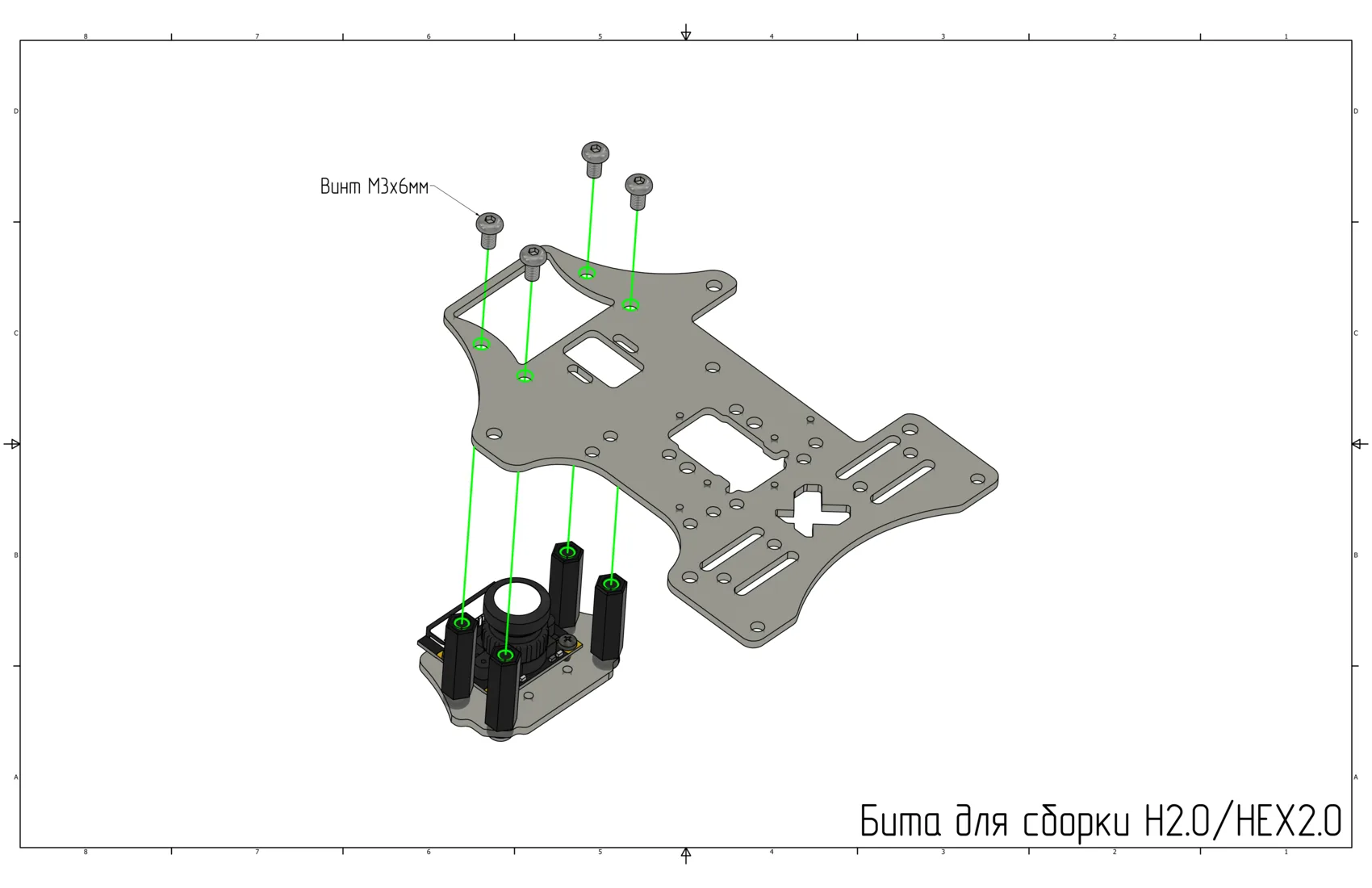
Установите малую монтажную деку с камерой на деку захвата с помощью винтов M3x6 (Ячейка 9).
Установите лазерный дальномер на деку захвата с помощью винтов M2x6 (Ячейка 16) и нейлоновых гаек M2 (Ячейка 5).
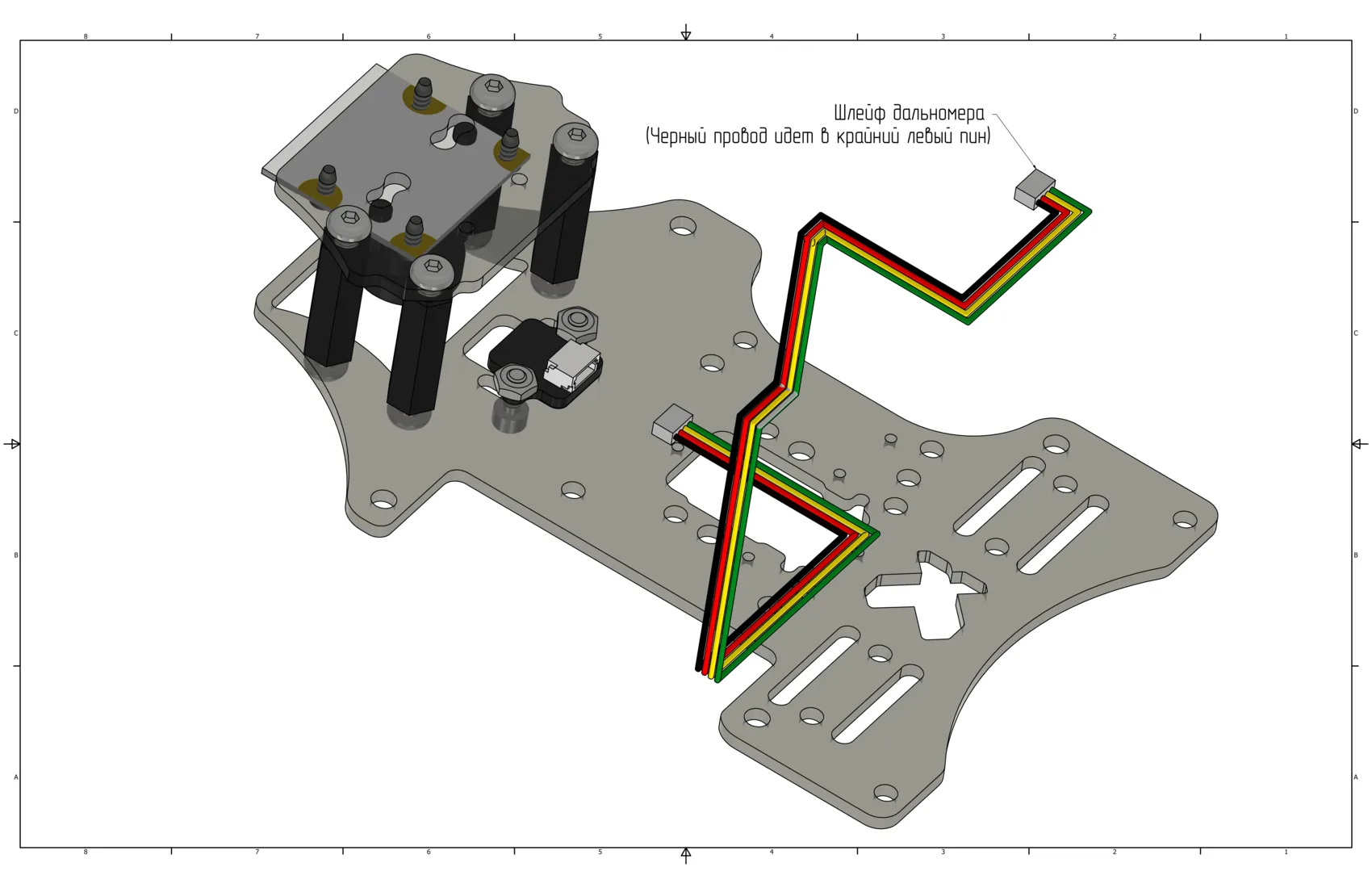
Подключите шлейф лазерного дальномера.
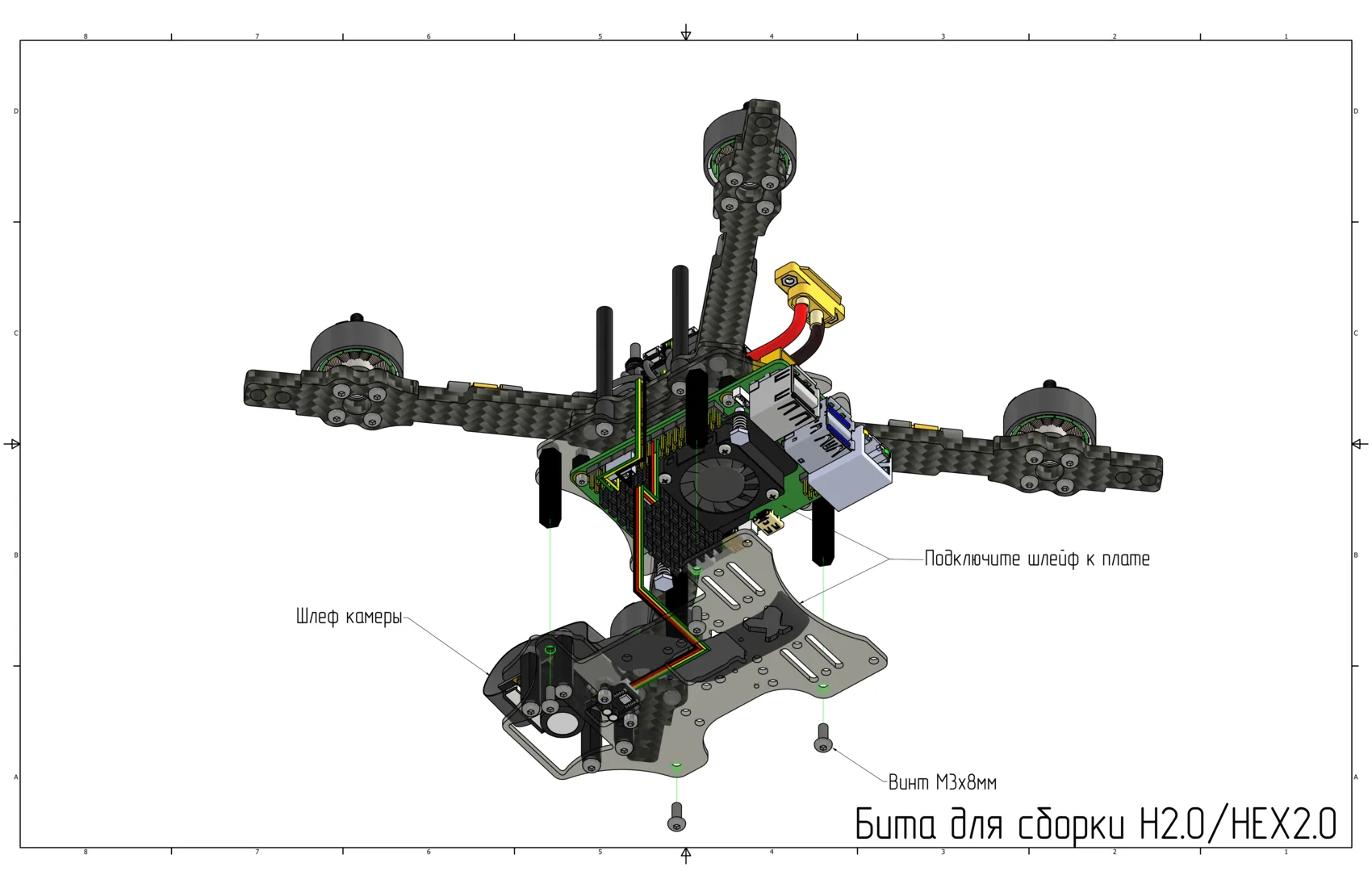
Установите деку захвата на квадрокоптер с помощью винтов M3x8 (Ячейка 8).
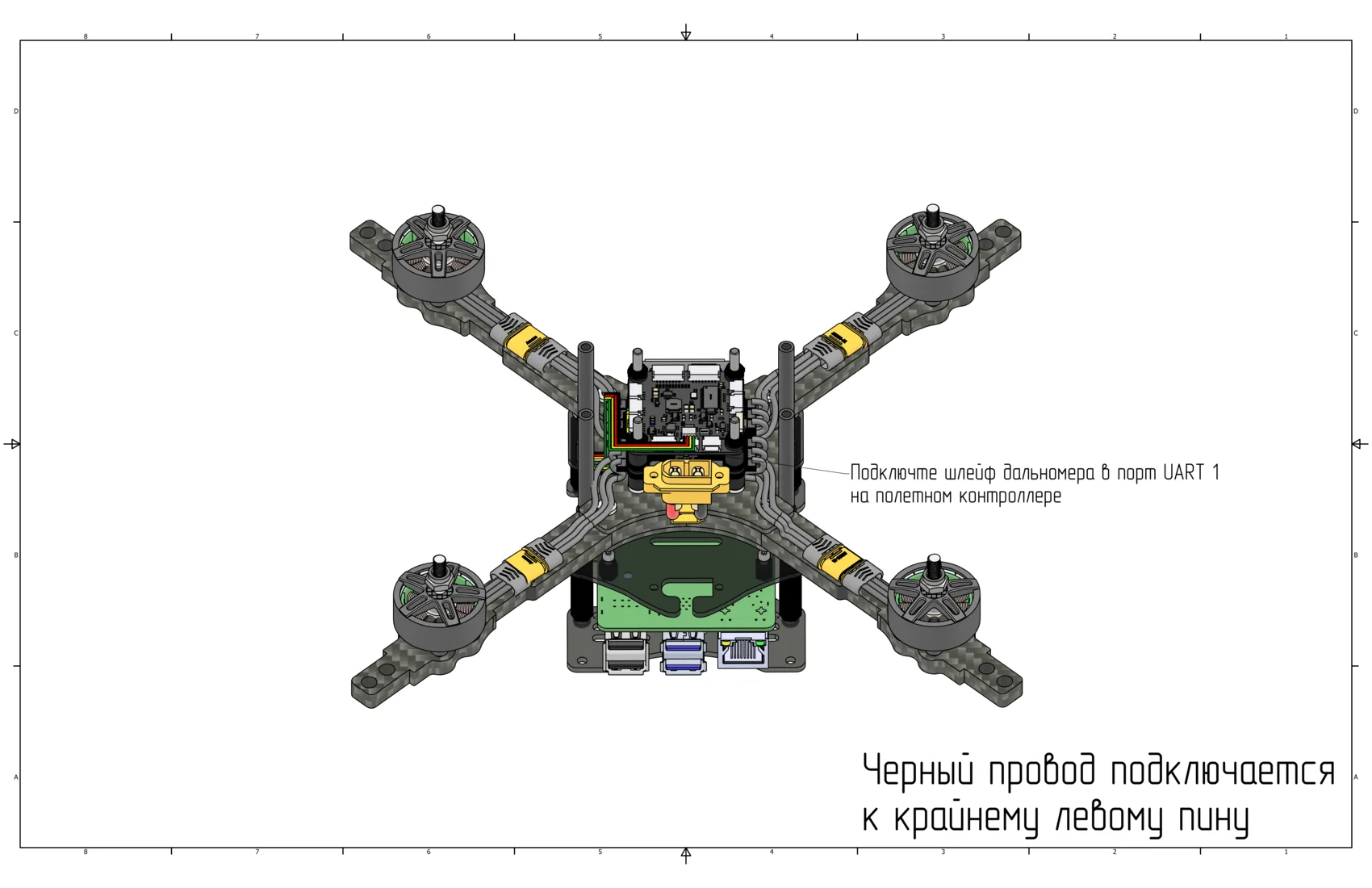
Подключите шлейф дальномера в порт UART 1 на полетном контроллере(черный провод в левом крайнем пину).
Установите экран на кожух дрона при помощи винтов M2.5x6 (Ячейка 18) и нейлоновых гаек M2.5 (Ячейка 4).
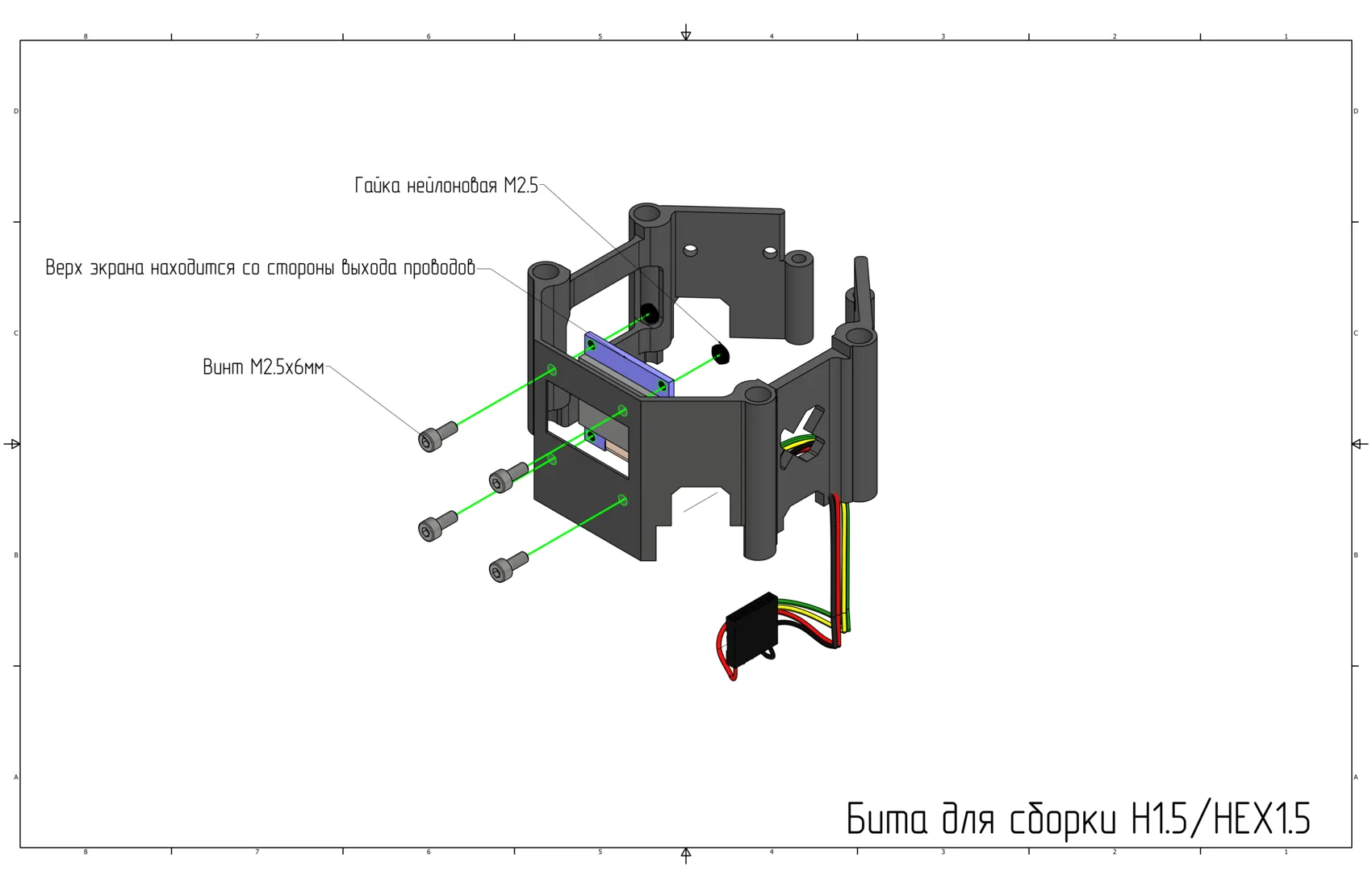
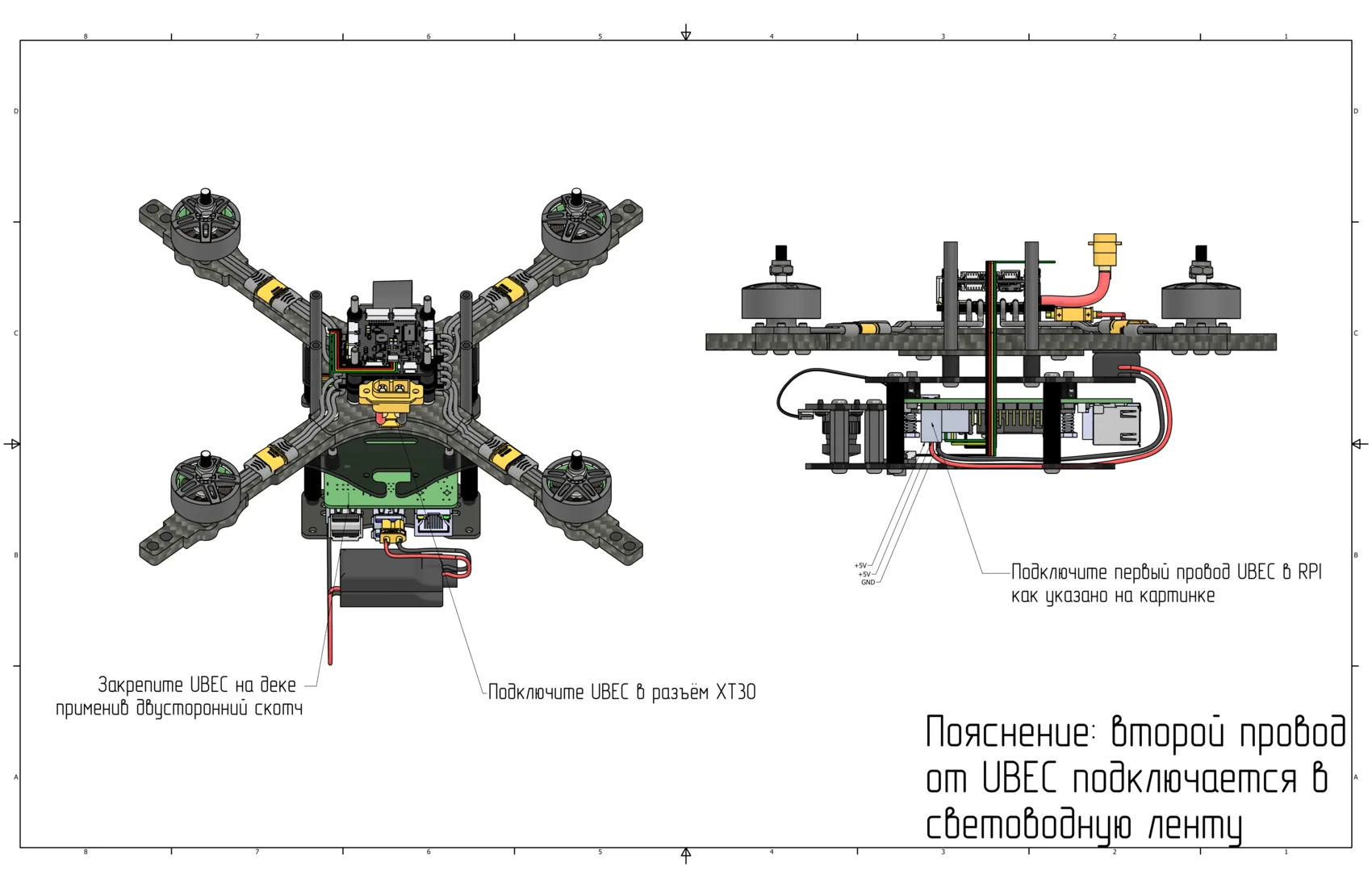
Установите UBEC на деку с Raspberry pi применив двухсторонний скотч. Подключите UBEC к регулятору оборотов (ESC) через разъем XT30. Подключите первый провод UBEC в Raspberry pi как указано на картинке(4 и 6 пины, см. pinout выше).
Подключите приемник в порт SBUS/CRSF (UART 6) на полетном контроллере(черный провод в левом крайнем пину).
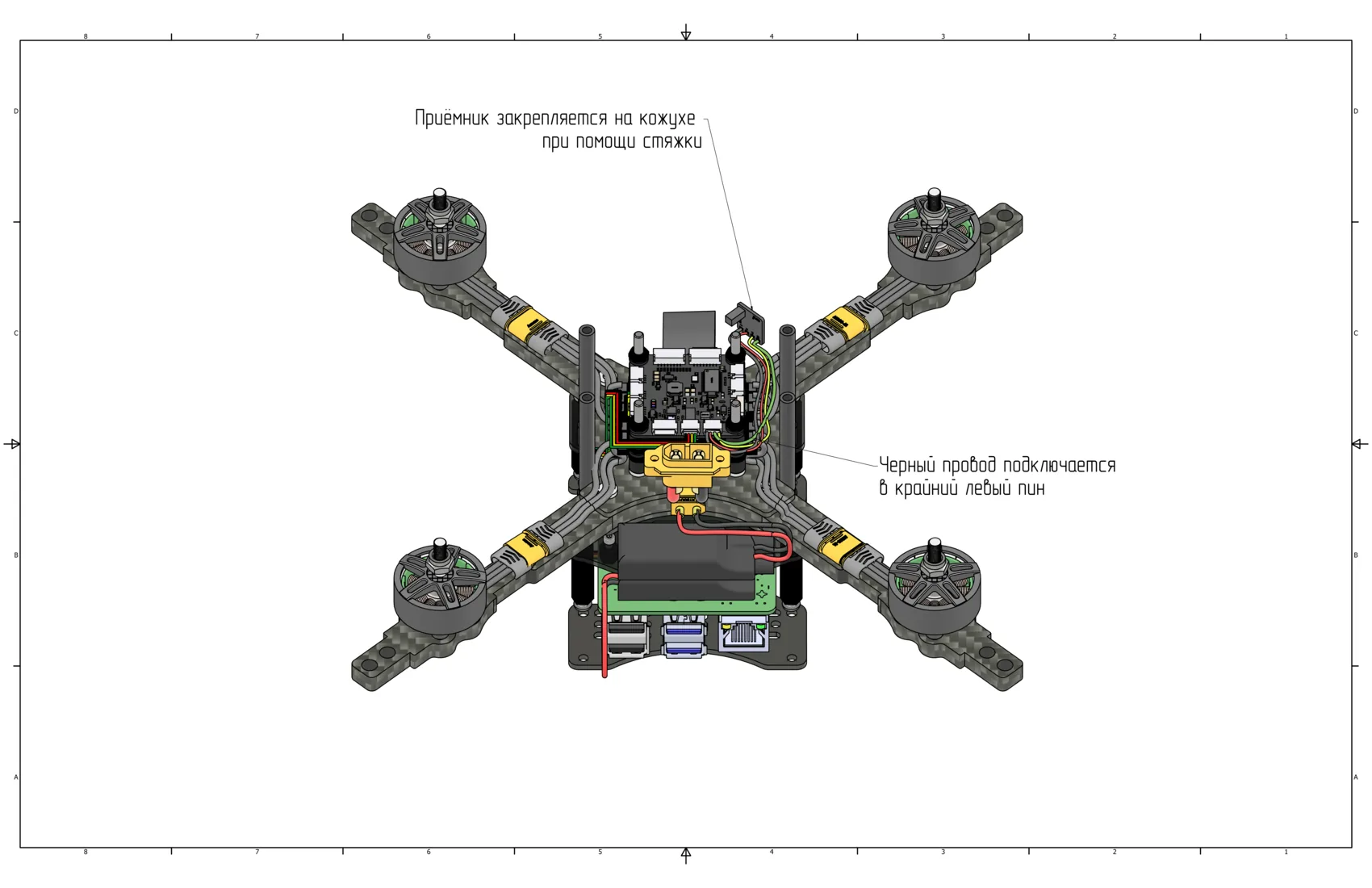
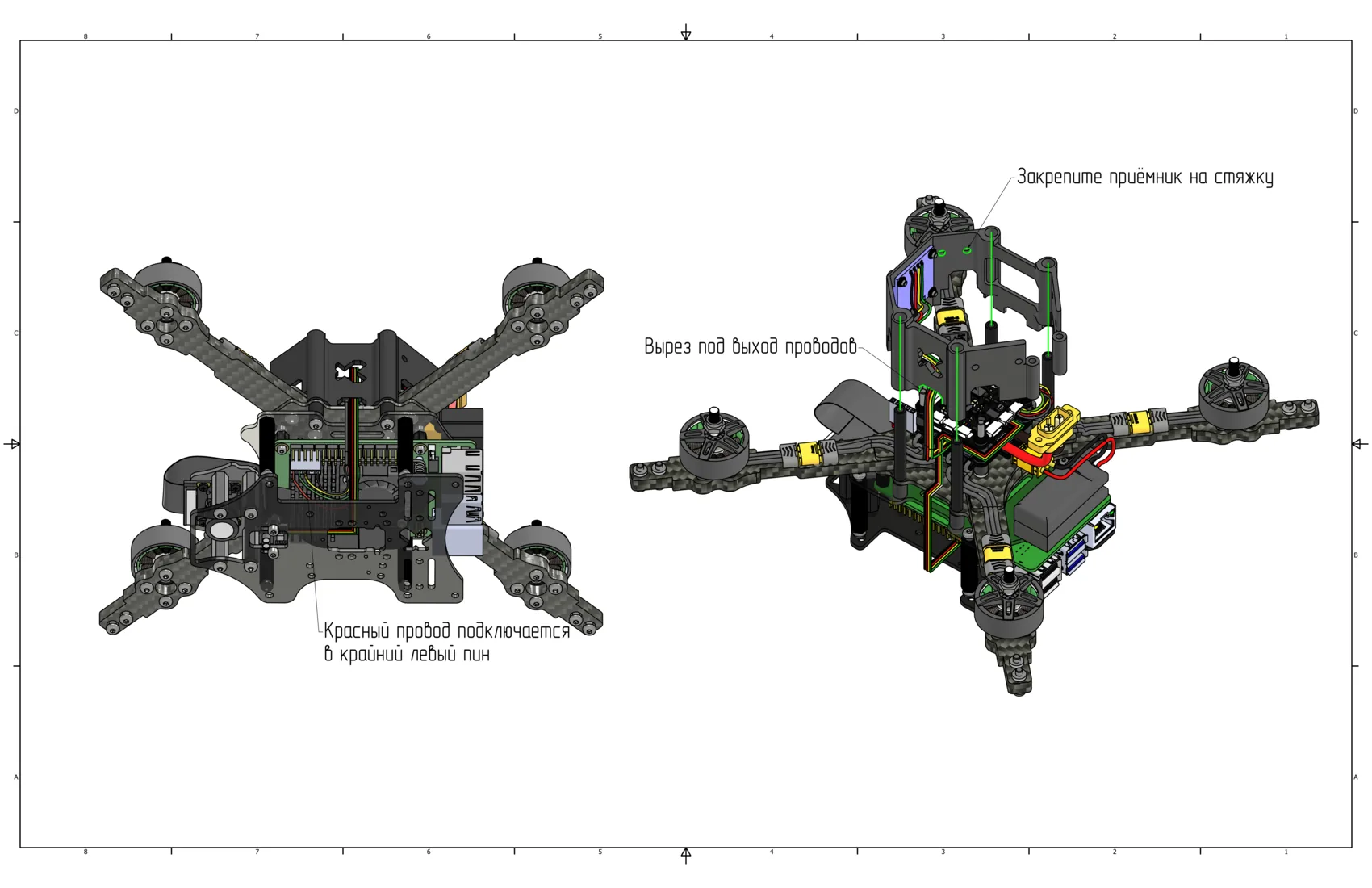
Установите кожух поверх алюминиевых стоек и закрепите приемник на пластиковый хомут, в выделенные отверстия на изображении. Уложите провода в вырез для проводов. Подключите экран к Raspberry pi, красный провод подключается в левый крайний пин внутренней части гребенки, относительно SD карты(красный - 1 пин, чёрный - 9 пин).
Установка защиты, ножек и LED ленты
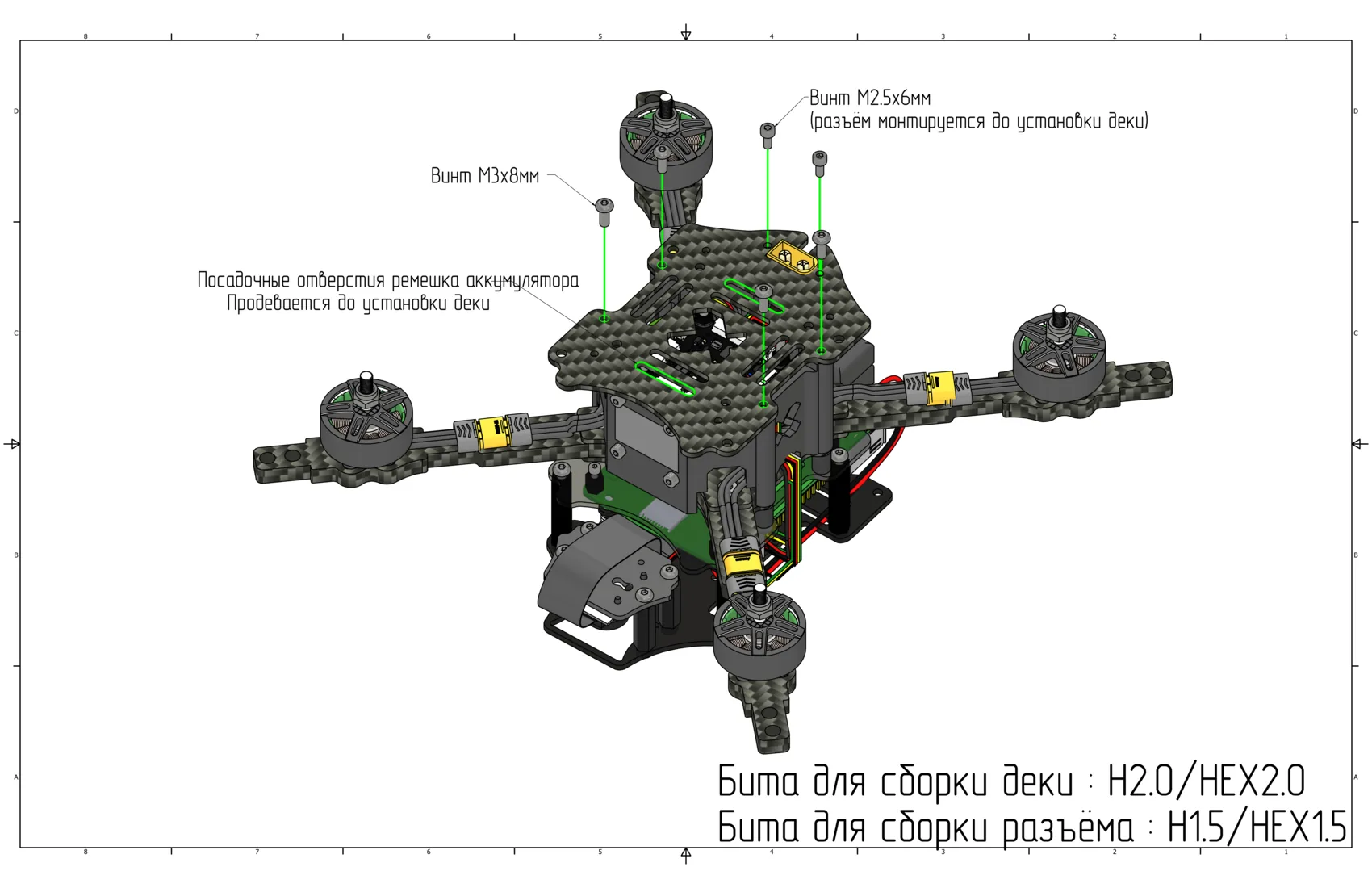
Проденьте ремешок в верхнюю деку, после чего закрепите ее на винты M3x8 (Ячейка 8) в алюминиевые стойки, закрепите разъем питания с помощью винтов M2.5x6 (Ячейка 18). Бита для сборки деки - H2.0/HEX2.0, для разъема - H1.5/HEX1.5.
Расположите снизу в виде квадрата перемычки защиты, после чего на углы выложите нижние дуги защиты, зафиксируйте на винты M3x10 (Ячейка 13) сверху, снизу нейлоновые стойки 40мм (Ячейка 23).

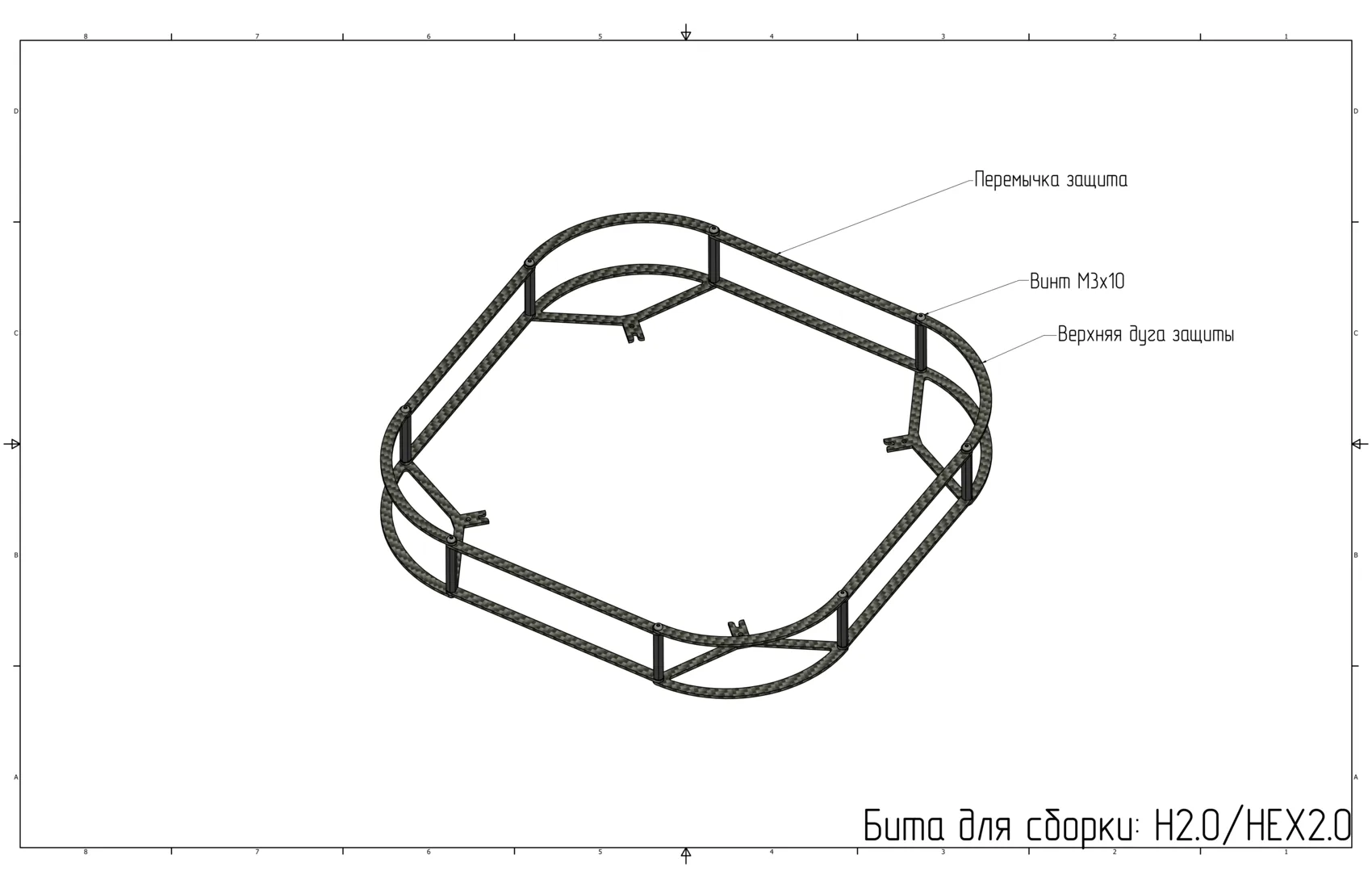
Зафиксируйте винтами M3x8 (Ячейка 8) верхние дуги и перемычки в обратном порядке, должно получится так, что перемычки направлены внутрь, а дуги наружу.
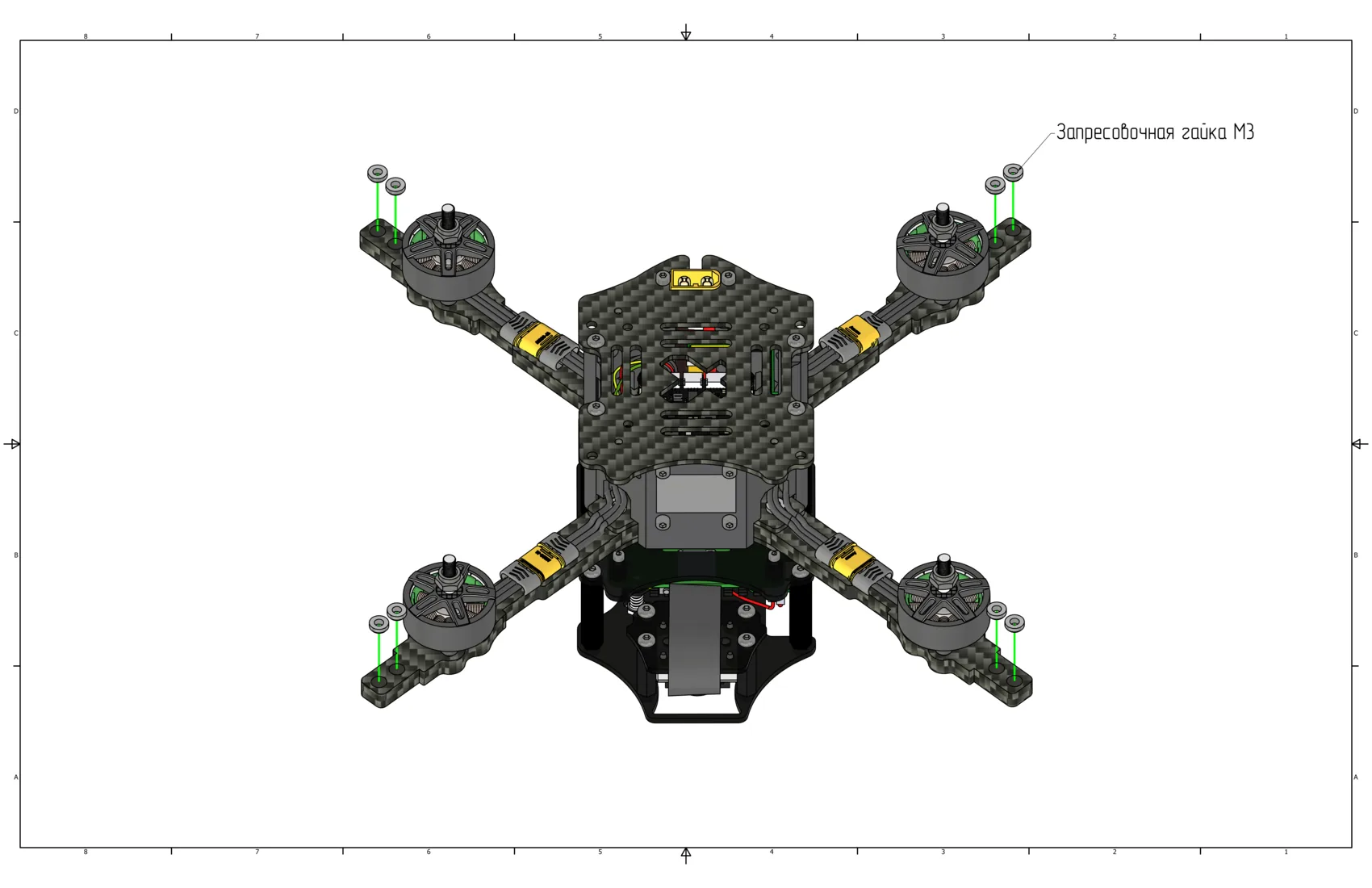
Установите и зафиксируйте запрессовочные гайки М3 (Ячейка 1) в отверстия по краям лучей.
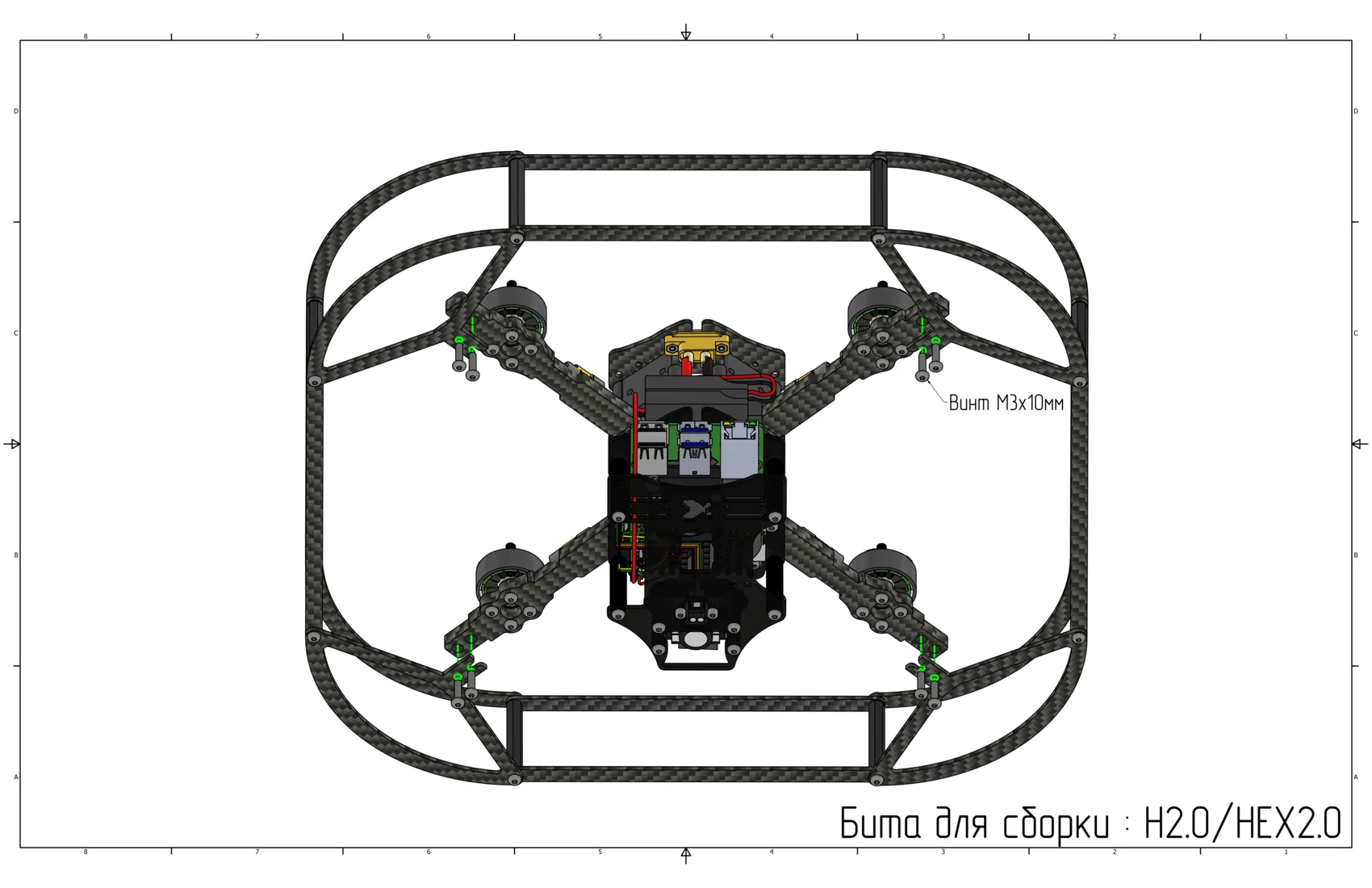
Установите с нижней стороны защиту и зафиксируйте её на винты M3x10 (Ячейка 13).
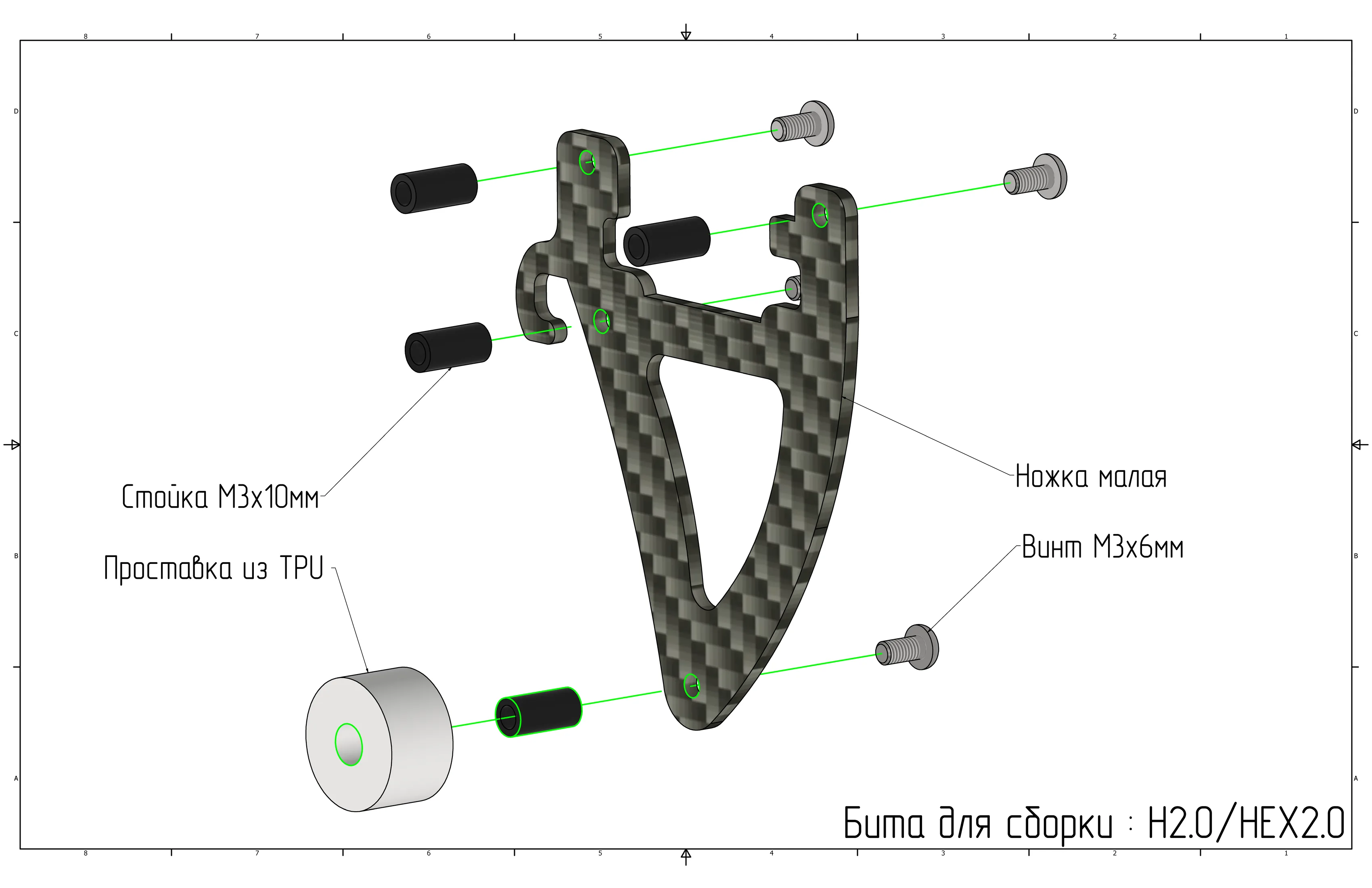
С одной стороны маленькой ножки вкрутите винты M3x6 (Ячейка 9) во все отверстия, с другой стороны зафиксируйте их на алюминиевыми стойками 10мм (Ячейка 14). В нижнем отверстии поверх стойки наденьте ножку из TPU (Ячейка 25).
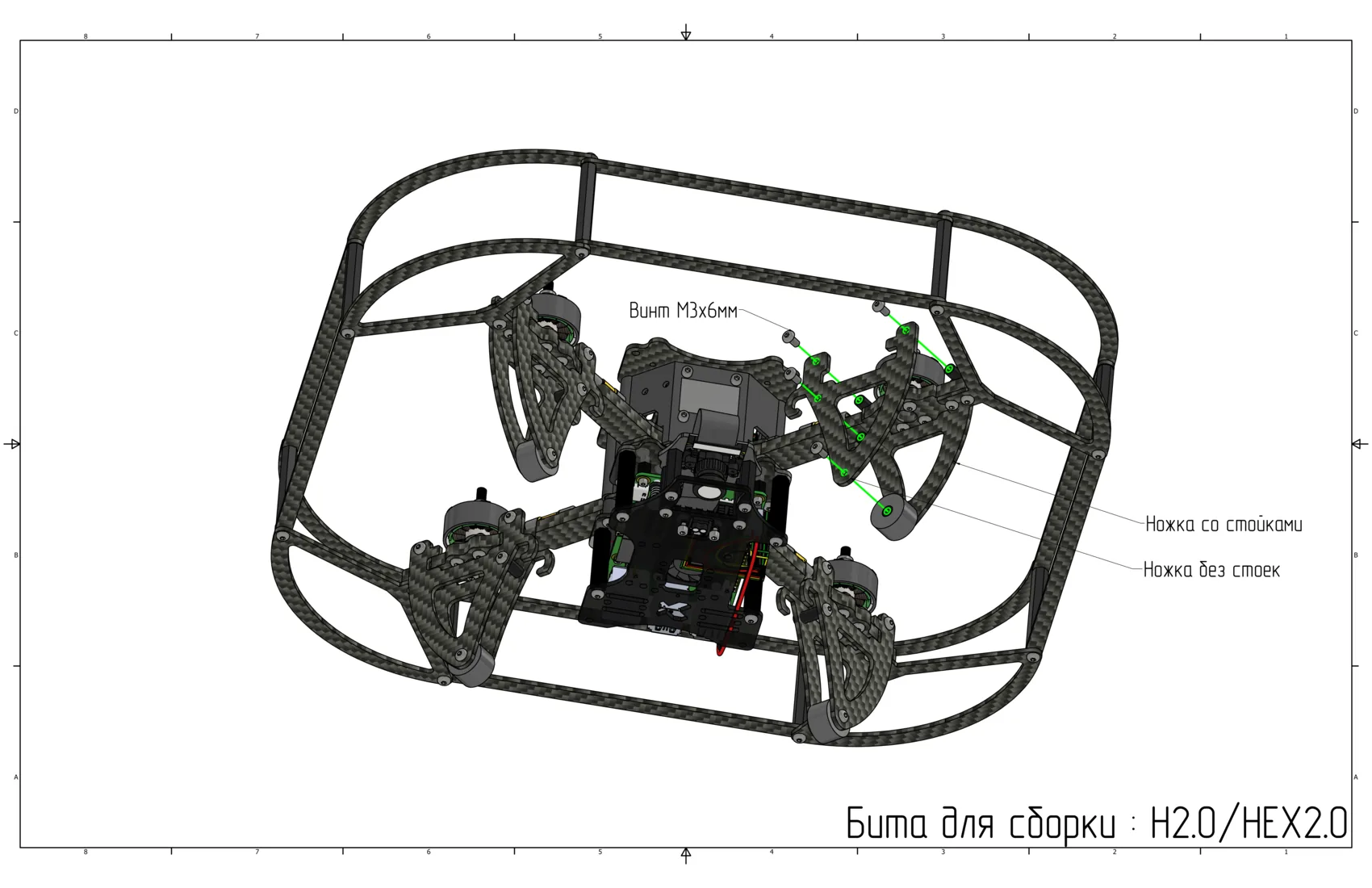
Разместите маленькую ножку на луче, как показано на изображении и зафиксируйте винтами M3x6 (Ячейка 9). Выполните тоже самое для остальных ножек.
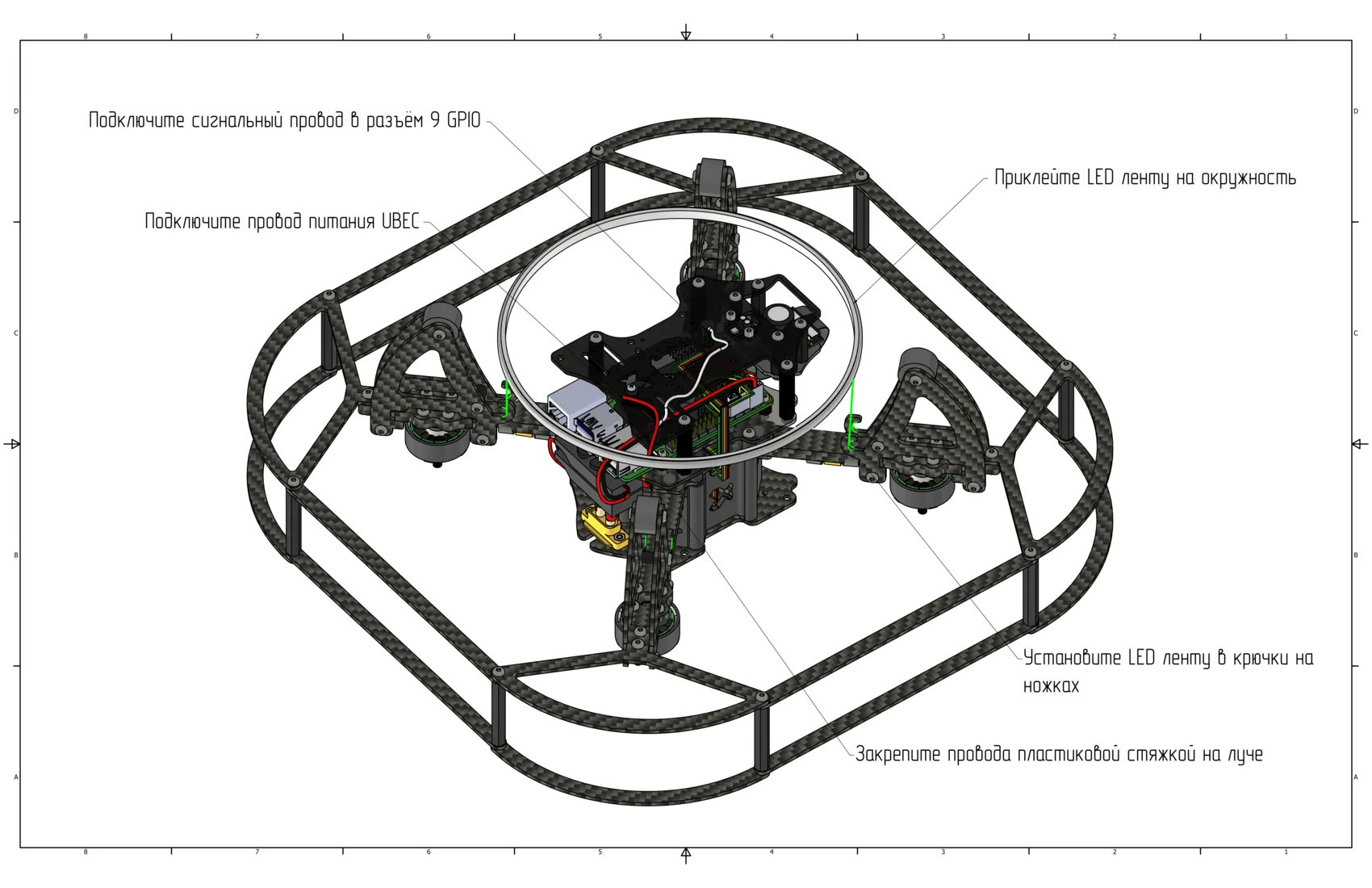
Наклейте LED ленту на окружность (Пластиковое кольцо для крепежа LED ленты) после чего установите в крючки на ножках и зафиксируйте провода пластиковым хомутом. Подключите питание во второй свободный UBEC, а сигнальный провод подключите в 9 GPIO (21 пин).
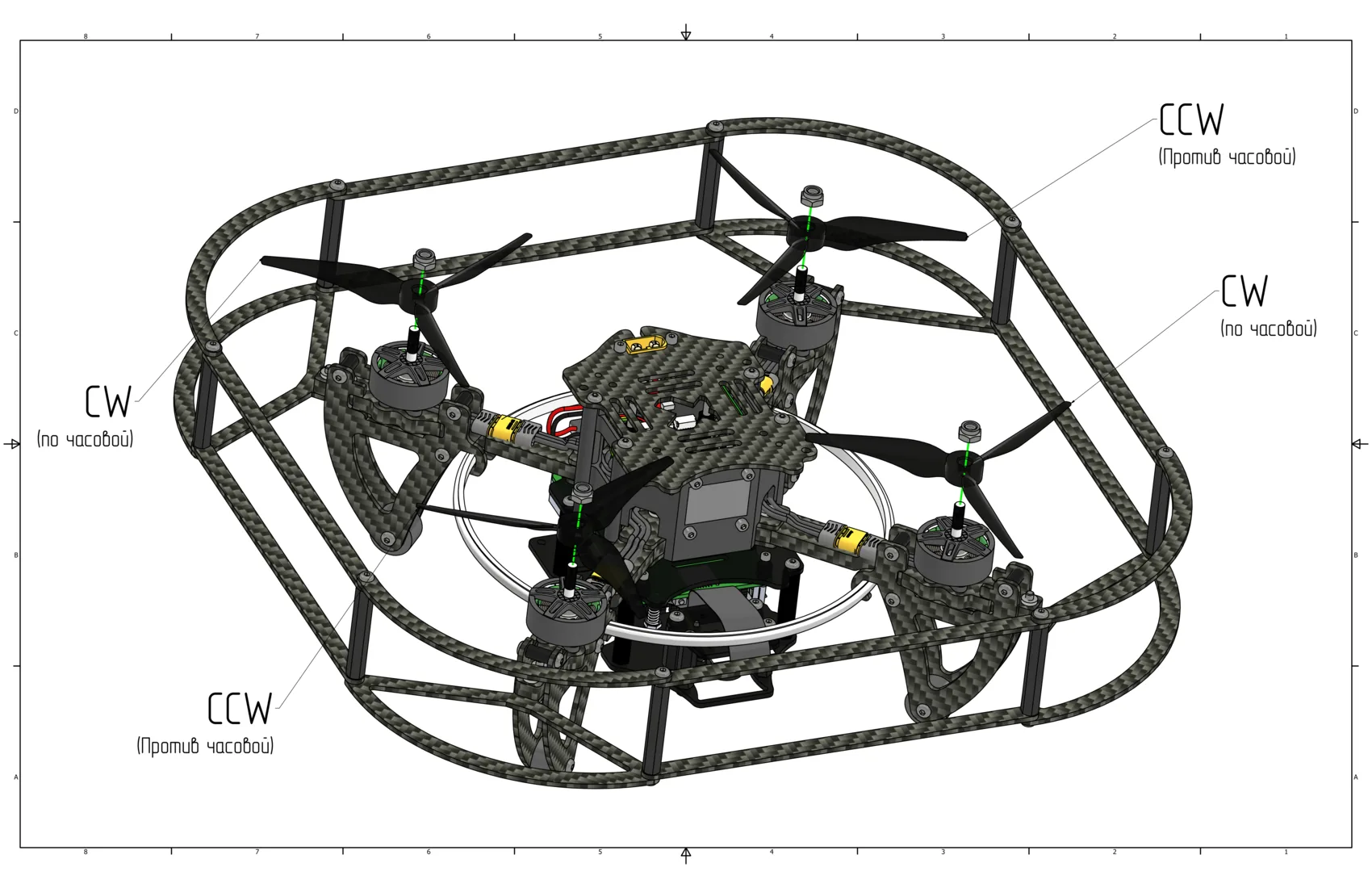
Установите пропеллеры в соответствии с классическим вращением, как представлено на изображении.
Проверьте, что ни один из компонентов не остался незакрепленным. Перед первым включением убедитесь, что пропеллеры не задевают кожух и провода.