Working with Magnetic Gripper
Contents
- Module Assembly and Installation
- Testing the Setup
- Controlling the Magnetic Gripper via RC Transmitter
Module Assembly and Installation
Solder the magnetic gripper module according to the wiring diagram. The wire ends should have Dupont female connectors (wire length ~10-15cm).
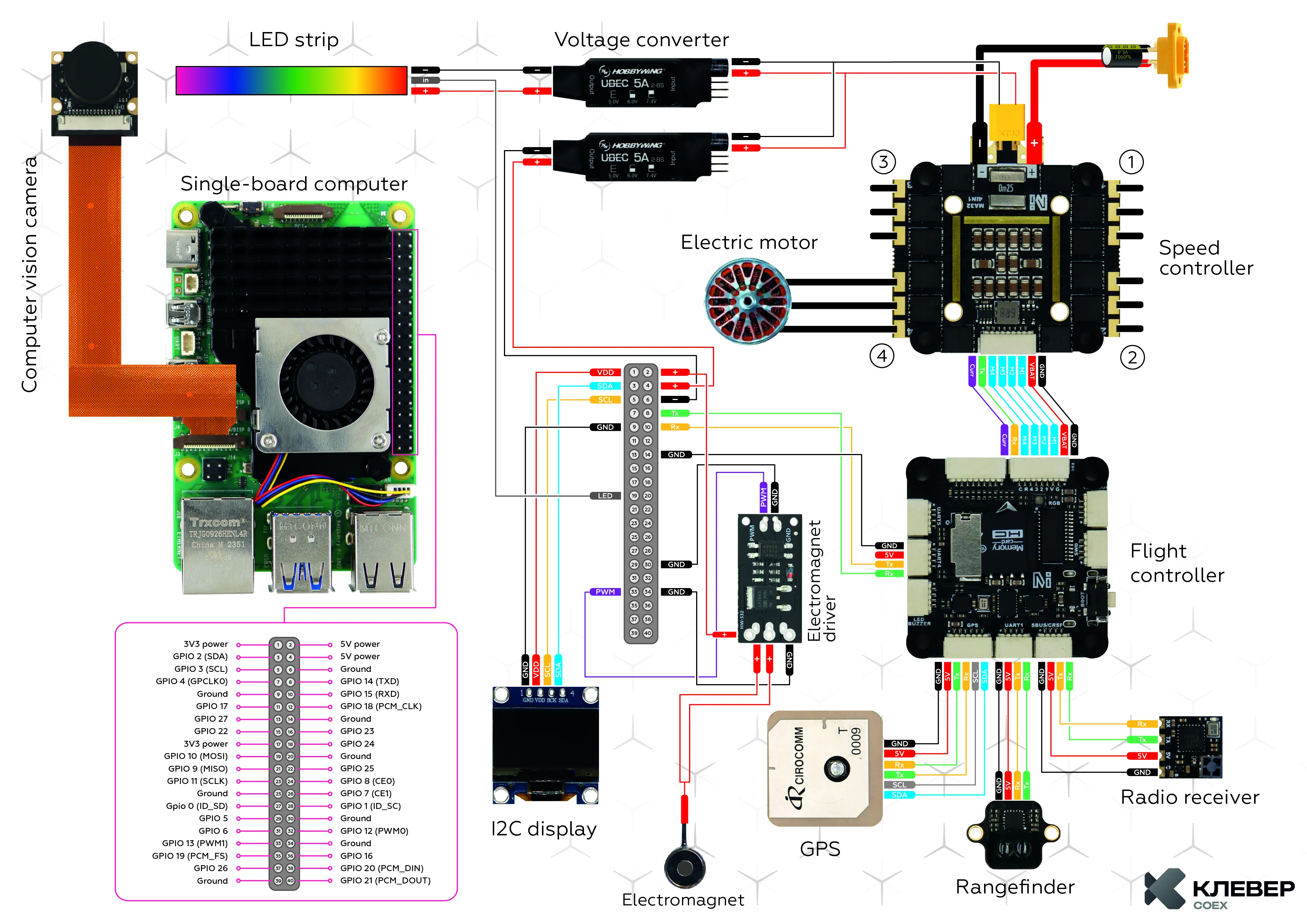 Electronics wiring diagram
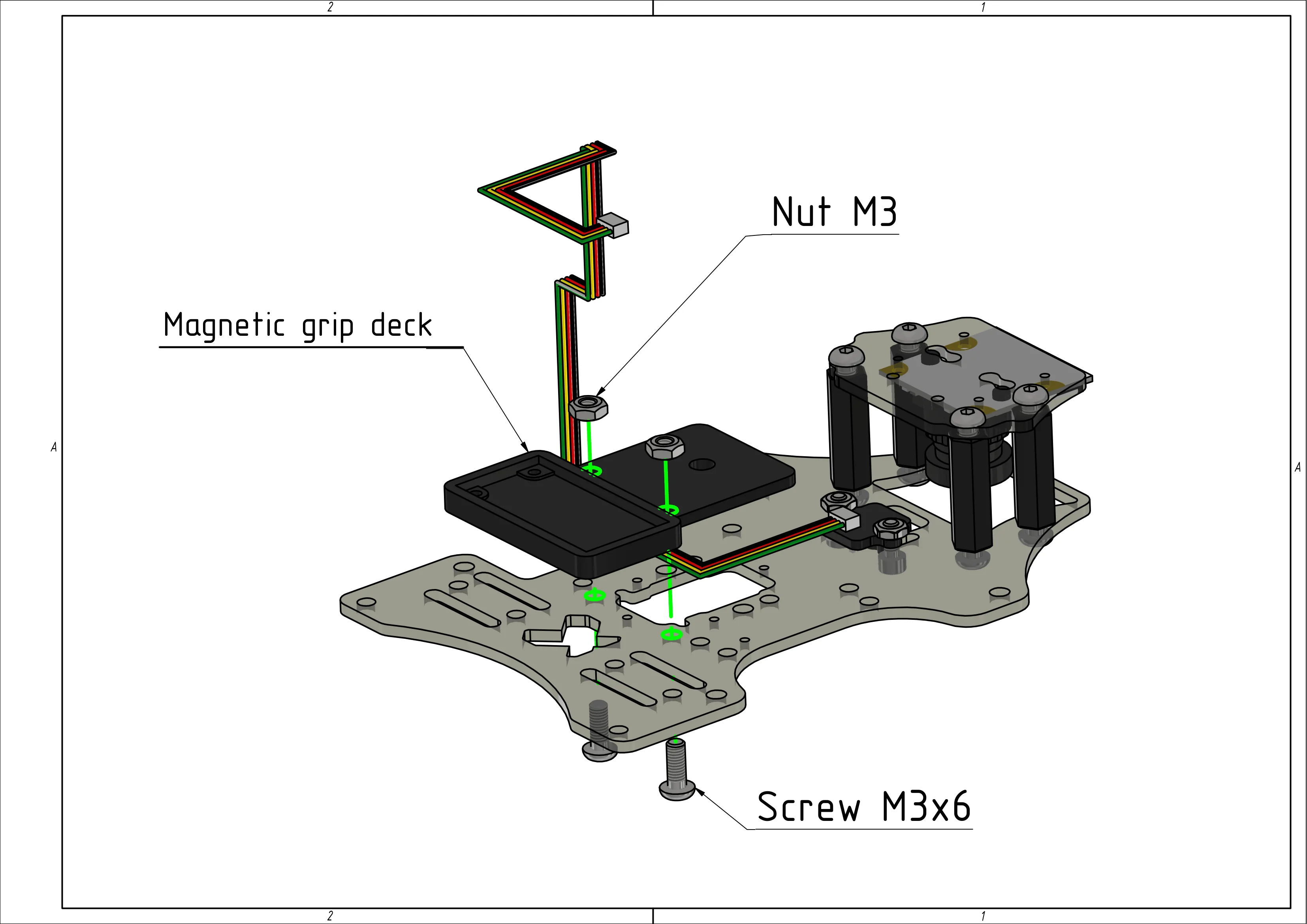
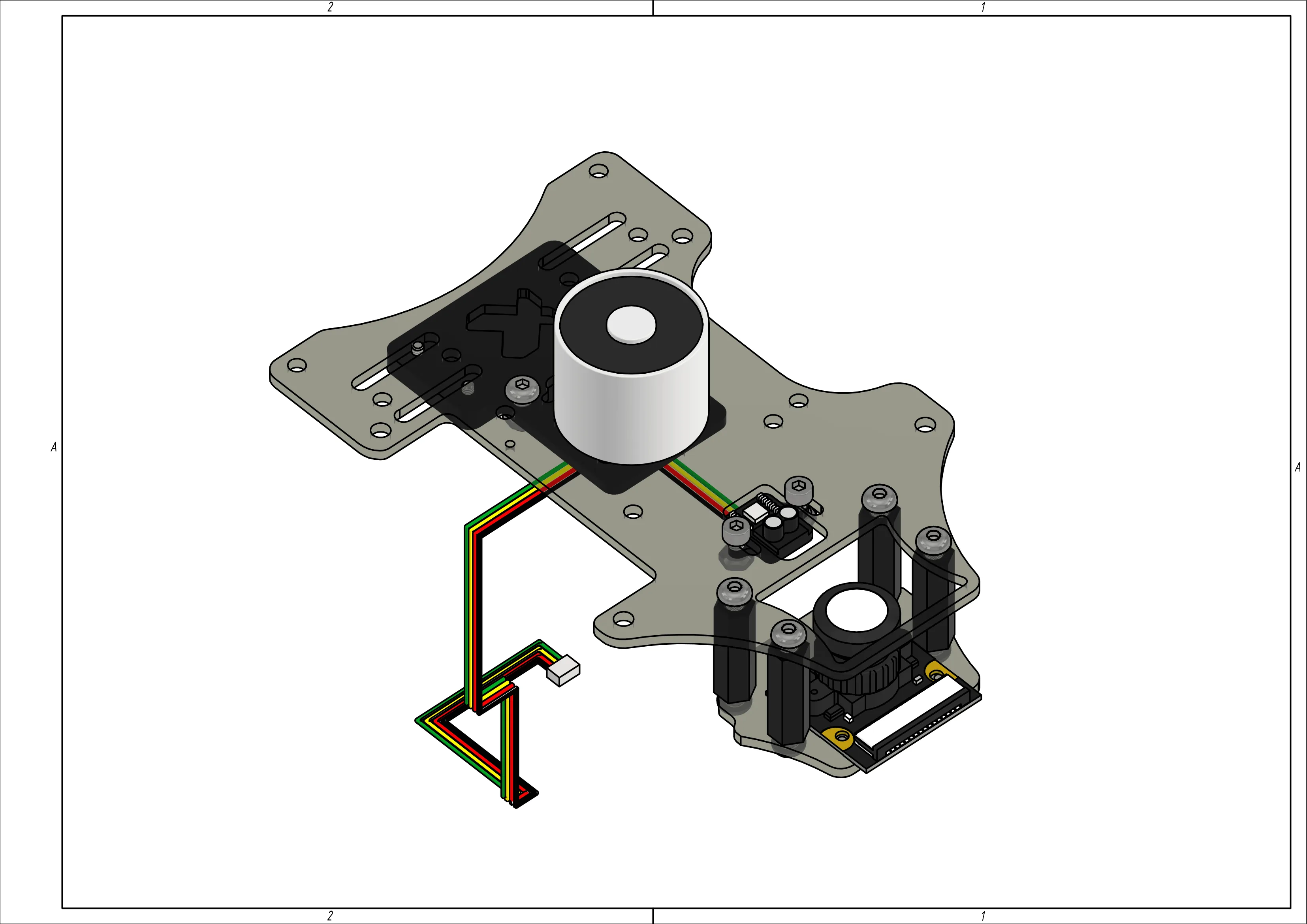
Electronics wiring diagramMount the magnetic gripper deck using M3x6 screws and M3 nuts.
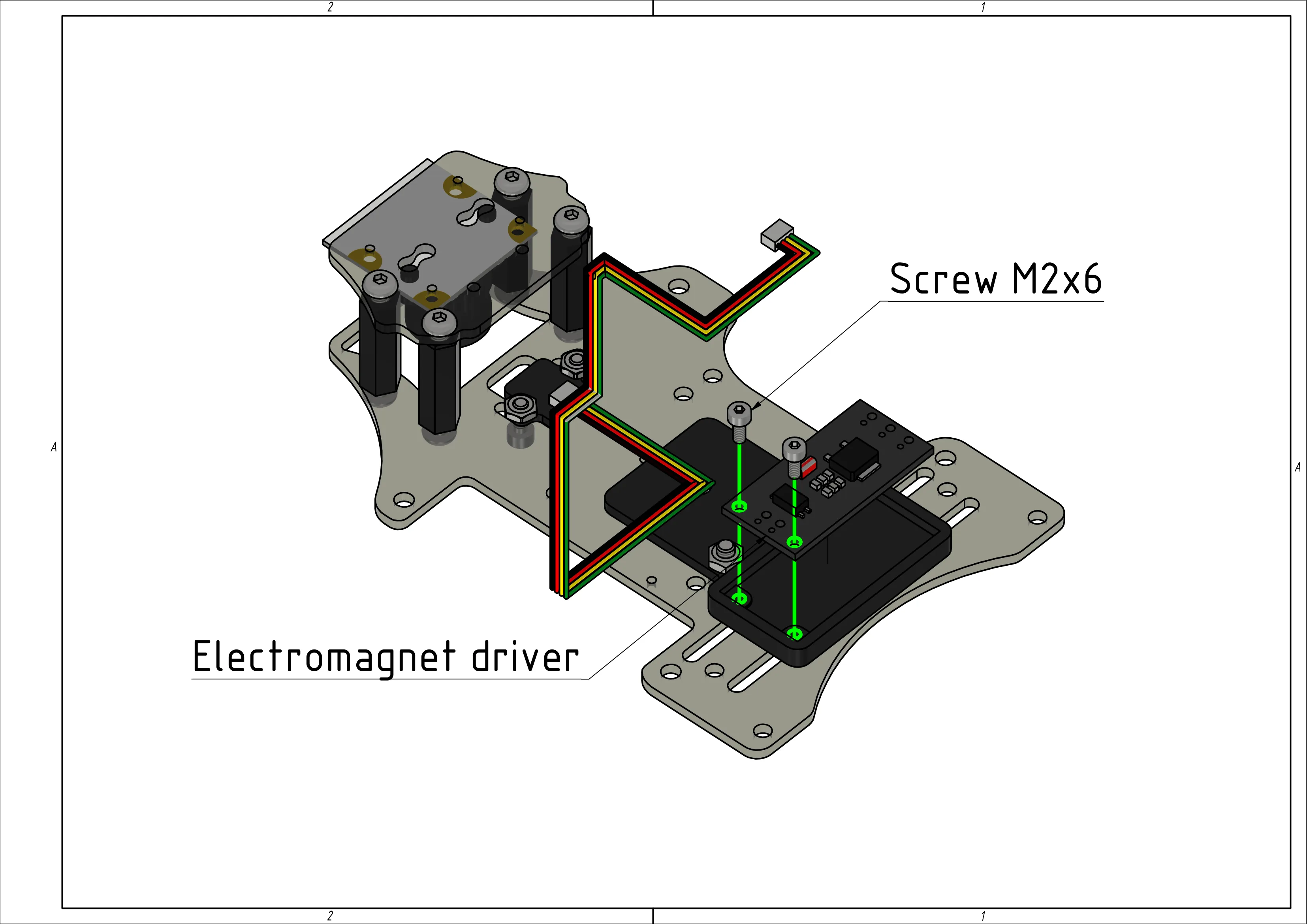
Install the electromagnet module onto the gripper deck using M2x6 screws.
Attach the electromagnet to the gripper deck using an M4x6 screw.
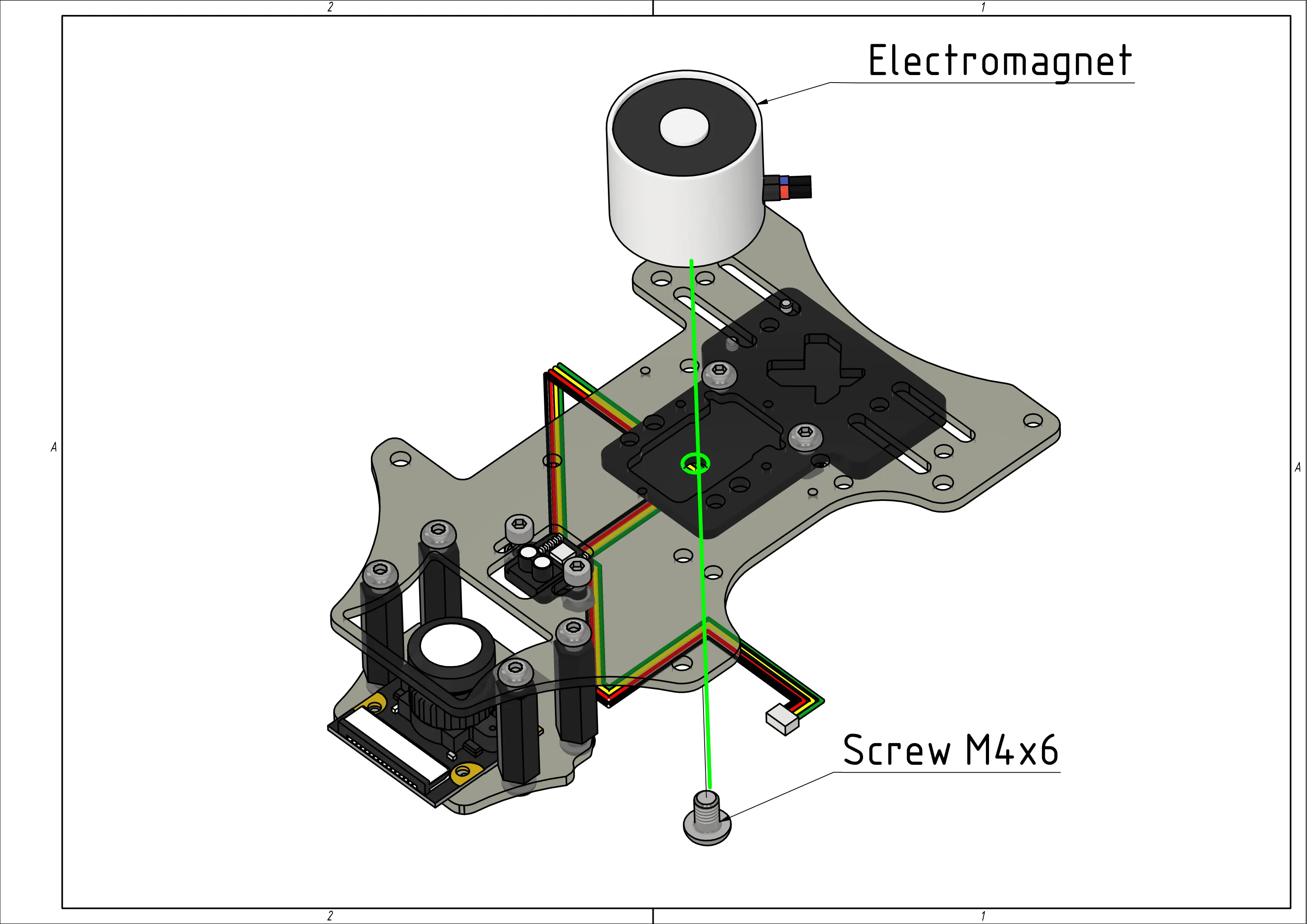
Assembled magnetic gripper.
Connect the magnetic gripper to Raspberry Pi according to the electronics wiring diagram (see step 1).
Testing the Setup
Upload the sample code to test the magnetic gripper functionality.
from rpi_hardware_pwm import HardwarePWM
import time
# pwmchip0, channel 1
pwm = HardwarePWM(pwm_channel=1, hz=50, chip=0)
def control_magnet(on_time=2, off_time=2):
try:
pwm.start(0)
while True:
print("ON")
pwm.change_duty_cycle(100)
time.sleep(on_time)
print("OFF")
pwm.change_duty_cycle(0)
time.sleep(off_time)
finally:
pwm.stop()
if __name__ == "__main__":
control_magnet(on_time=2, off_time=2)
Controlling the Magnetic Gripper via RC Transmitter
Reading RC Channel Values
For MAVROS topics documentation, see the link.
Sample code for reading channel values when toggling a switch:
import rospy
from mavros_msgs.msg import RCIn
last_state = None
def rc_callback(data: RCIn):
global last_state
if len(data.channels) <= 6:
return
ch = data.channels[6]
if ch < 1000:
state = 'ARMING'
elif ch > 1900:
state = 'DISARMED'
else:
state = None
if state is not None and state != last_state:
print(state)
last_state = state
def main():
rospy.init_node('rc_reader')
rospy.Subscriber('mavros/rc/in', RCIn, rc_callback)
rospy.spin()
if __name__ == '__main__':
main()
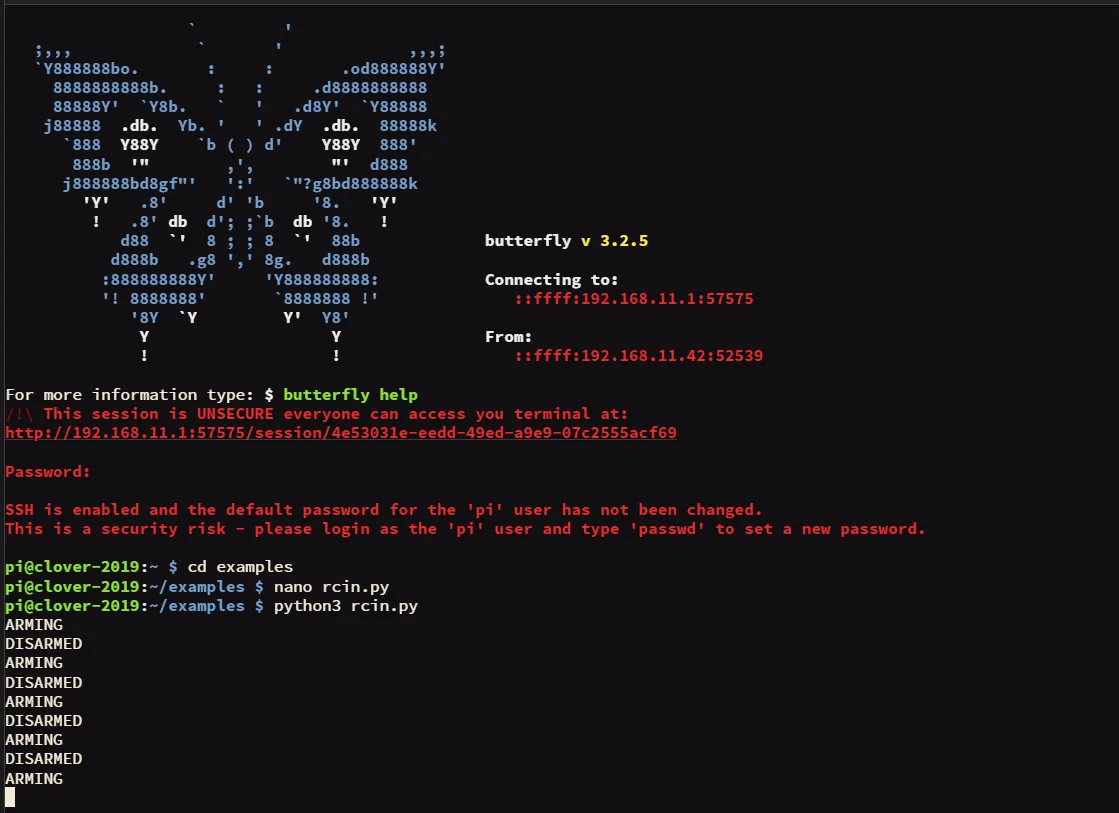
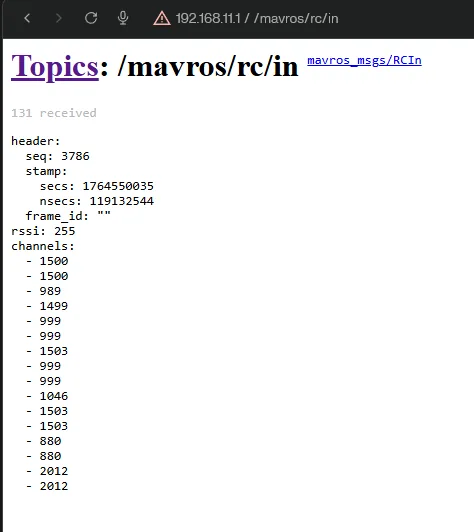
Example output in topic and terminal:
Magnetic Gripper Control Code Examples
Sample code for controlling the magnetic gripper via RC transmitter:
import rospy
from mavros_msgs.msg import RCIn
from rpi_hardware_pwm import HardwarePWM
pwm = None
magnet_on = False
def rc_callback(data: RCIn):
global magnet_on
if 6 >= len(data.channels):
return
ch = data.channels[6]
if ch < 1000 and magnet_on:
rospy.loginfo("OFF")
pwm.change_duty_cycle(0)
magnet_on = False
elif ch > 1900 and not magnet_on:
rospy.loginfo("ON")
pwm.change_duty_cycle(100)
magnet_on = True
def main():
global pwm
rospy.init_node('magnet_rc')
pwm = HardwarePWM(pwm_channel=1, hz=50, chip=0)
pwm.start(0)
rospy.Subscriber('mavros/rc/in', RCIn, rc_callback)
rospy.loginfo("magnet_rc start")
rospy.spin()
pwm.stop()
if __name__ == '__main__':
main()
Sample code for smooth payload pickup using a servo:
import rospy
from mavros_msgs.msg import RCIn
from rpi_hardware_pwm import HardwarePWM
pwm = None
S1_INDEX = 8
RC_MIN = 1000
RC_MAX = 2000
ANGLE_MIN = 0.0
ANGLE_MAX = 90.0
DUTY_MIN = 3
DUTY_MAX = 12
def rc_callback(msg: RCIn):
if len(msg.channels) <= S1_INDEX:
return
ch = msg.channels[S1_INDEX]
if ch < RC_MIN:
ch = RC_MIN
elif ch > RC_MAX:
ch = RC_MAX
k = float(ch - RC_MIN) / float(RC_MAX - RC_MIN)
angle = ANGLE_MIN + (ANGLE_MAX - ANGLE_MIN) * k
duty = DUTY_MIN + (DUTY_MAX - DUTY_MIN) * (angle / ANGLE_MAX)
pwm.change_duty_cycle(duty)
def main():
global pwm
rospy.init_node('servo_from_slider')
pwm = HardwarePWM(pwm_channel=1, hz=50, chip=0)
pwm.start(DUTY_MIN)
rospy.Subscriber('mavros/rc/in', RCIn, rc_callback)
rospy.loginfo('servo_from_slider start')
rospy.spin()
pwm.stop()
if __name__ == '__main__':
main()